Answer to Q.15
The amplitude ratio and the phase lag for of the process transfer function GP can be expressed as the following,
|
(1) |
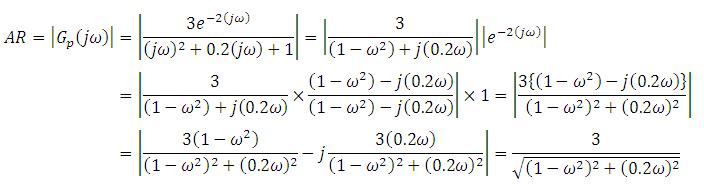
And
|
(2) |

Following table is prepared for a frequency range 0.01≤ ω ≤10 using eqn. (1) and (2).
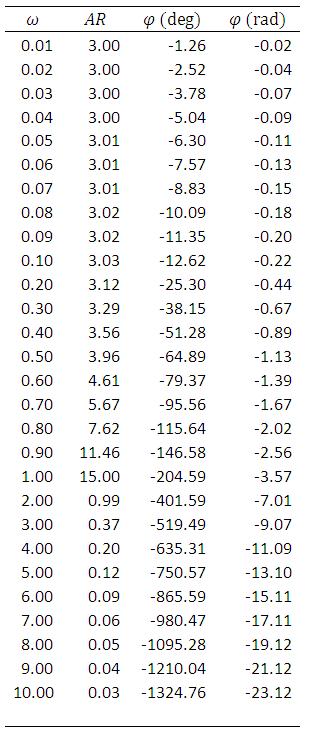
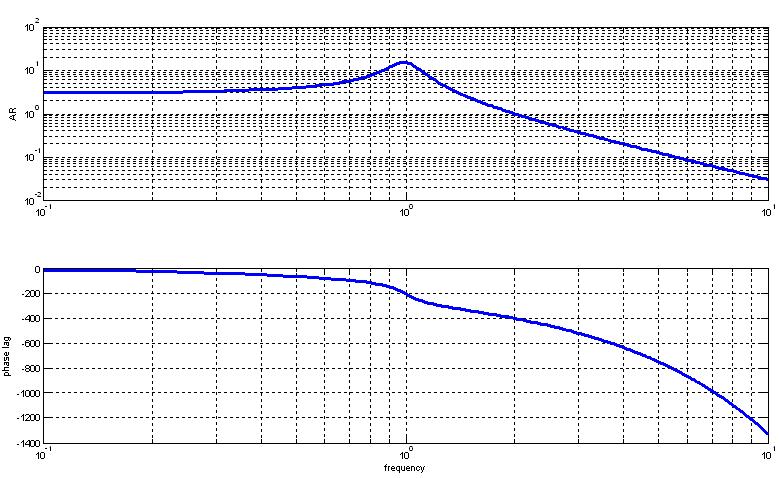
The Bode Plot is drawn with the values of above table
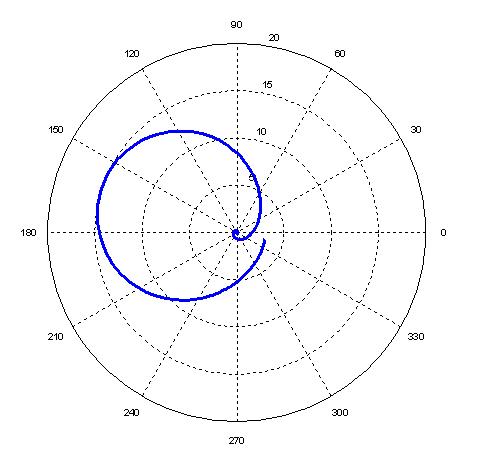
The Nyquist Plot is also drawn as
In order to design a controller using Ziegler-Nichols tuning technique, one needs to find the crossover frequency of the system.
|
(3) |

Solving for ωco, we obtain ωco = 0.9635 and AR at the crossover frequency is 14.59, hence the ultimate gain, Ku=1/14.49=0.0685 and ultimate period of oscillation, ![]()
According to Ziegler-Nichol's tuning technique, a PID controller for the above condition will have the following parameters:
|
(4) |

None of you have calculated the crossover frequency correctly. This is because you have solely depended upon the calculator rather than going further into it. Most of you have got the value ωco = 1.66, now see what happens to eq. (3)
|
|
The second term itself is more than (-π) . The first term is contributing some positive value and that is why overall calculation is coming to (-π) .The dead time is contributing such a high phase lag that crossover frequency is reached much sooner than expected. Higher is the dead time, smaller is the crossover frequency. You need to be careful about this.