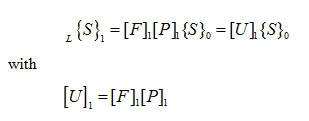
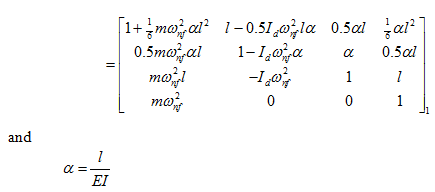
For shaft segment (1) as shown in Figure 8.35(b), the state vector can be related as
 |
(a) |
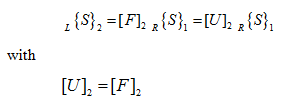
For second branch, the state vector can be written as
 |
(b) |
End conditions for the overhang rotor as shown in Figure 8.35(a) can be written as
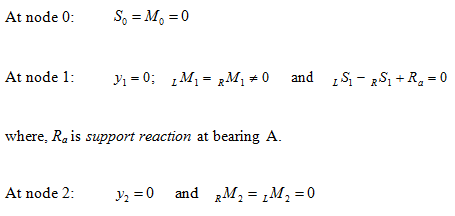 |
(c)
(d)
(e) |
From the first shaft segment, i.e., equation (a), on application of end conditions of equation (c), we have
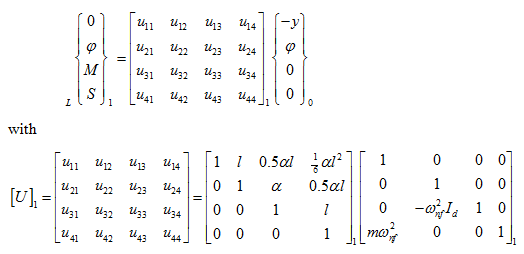 |
(f) |
 |
(g)
(h) |
From equation (f), the first set of equation gives
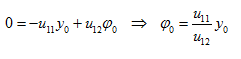 |
(i) |
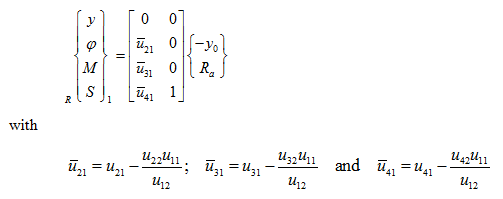
On using equation (i) into equation (f), we get state vectors in the left of station 1 as
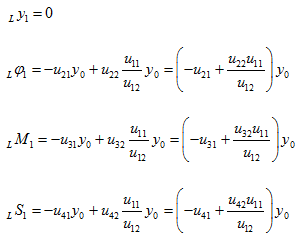 |
(j) |
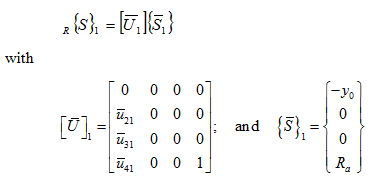
Now noting equations (d) and (j) we can have state vectors in the right of station 1 as
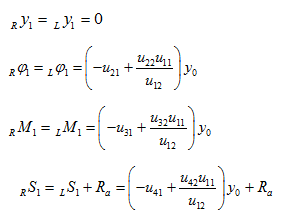 |
(k) |
Equation (k) can be written as
 |
(l) |
Equation (l) can be written in a standard form as
 |
(m) |