8.2.6 Gyroscopic effects: If gyroscopic effects are allowed for, in equation (8.47) the modified point matrix, [P *], will get some extra terms, however, the modified field matrix, [F *], will not be affected. For free vibrations, the formulation would have more general form since equations will contain both the natural whirl frequency, v (while considering gyroscopic effects we tried to distinguish the whirl natural frequency symbol by v in place of ωnf; while the former is speed-dependent v(ω), the latter is speed independent so that v(ω = 0) = ωnf), and the spin speed, ω , of the shaft. This leads to speed dependency of the natural whirl frequency.
Equilibrium equations for the moment in the y - z vertical and z - x horizontal planes, considering gyroscopic moments also, are given as (noting equation (8.39) and for gyroscopic terms refer Chapter 5)
{kind=link}
|
(8.60) |
and
|
(8.61) |
where Ip is the polar mass moment of inertia of the disc. In the modified matrix [P *], following rows and columns element will be affected: (i) Equations (8.60) and (8.61) are equations of moments, and in the state vector {S }, 3rd , 7th , 11th and 15th rows are for moment equations. Hence, only these rows in the modified matrix [P *] will be affected. Now in equations (8.60) and (8.61), additional terms for slopes, φy and φx (see Figure 8.22), are appearing because of gyroscopic effects. In the modified state vector {S *} the rotational displacements are at 2nd , 6th , 10th and 14th rows. Hence in the modified point matrix [ P * ] columns 2nd , 6th , 10th and 14th will be affected. For more clarity of the above explanation let us express rotational displacements and moments as
(8.62) |
where V be the natural whirl frequency with gyroscopic effects, and subscripts r and j represent the real and imaginary parts of a complex quantity, respectively (for brevity the subscript i corresponding to i th mass has been dropped). On substituting equation (8.62) into equation (8.60), we get
(8.63) |
Separating the real and imaginary parts from equation (8.63), we get
 |
(8.64)
(8.65) |
It should be noted that equation (8.64) corresponds to 11th row in equation (8.47) and gyroscopic effects term (i.e., −Iptωv, which is the coefficient of φyj that is in the 6th row of the modified state vector {S *}) in equation (8.64) will corresponds to 6th column in equation (8.47). Similarly, from equation (8.65), it can be seen that gyroscopic effects will introduce another term (i.e., Iptωv) at 15th row and 2nd column corresponding to Myzj and φyr , respectively. Hence, we have
(8.66) |
where Pi, j represent the additional element at the i th row and the j th column of the modified point matrix.
Similarly, using equation (8.61), we get the additional element of the modified point matrix as
(8.67) |
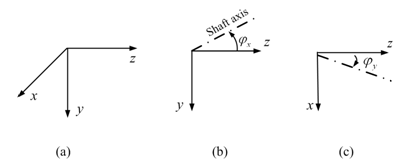
Figure 8.22 Coordinate axes and positive conventions for rotational displacements (a) Rectangular 3-dimensional axis system (b) tilting of the shaft axis in z - x plane (c) tilting of shaft axis in y - z plane
Hence, the modified point matrix with gyroscopic effect would relate state vectors in either side of i th disc as follows (refer Eqn. (8.47))
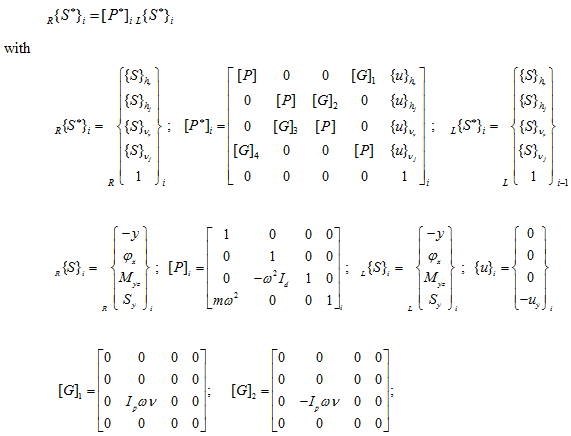 |
(8.68) |