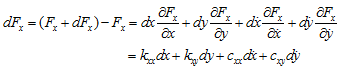
The change in the lubricant film forces are then given by
 |
(3.99) |
and
 |
(3.100) |
where kij and cij are known as the fluid-film stiffness and damping coefficients respectively, and i and j can take values of x and y. These bearing dynamic coefficients must be known in order to calculate the overall system dynamic response to an external forcing, and its stability. Values of kxx and kyx can be found from the Reynolds equation by calculating the lubricant film forces ![]() and when a small displacement dx is imposed on the journal (from its static equilibrium position) with dy,
and when a small displacement dx is imposed on the journal (from its static equilibrium position) with dy, ![]() and
and ![]() all set to zero. The process is then repeated with a displacement of – dx to calculate
all set to zero. The process is then repeated with a displacement of – dx to calculate ![]() and
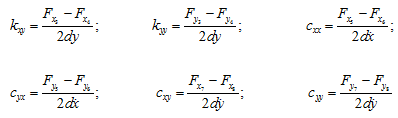
and ![]() . The stiffness coefficientskxx andkyx are then given by
. The stiffness coefficientskxx andkyx are then given by
|
(3.101) |
Similarly, values of the other stiffness and damping coefficients may be evaluated by imposing small variations in dy, ![]() and
and ![]() on the journal one at a time, and investigating their effect on the lubricant film forces, as
on the journal one at a time, and investigating their effect on the lubricant film forces, as
 |
(3.102) |
It should be noted that when proceeding in the manner described above care should be taken when formulating Reynolds equation (3.79) in the finite difference form, as the quantity ∂h/∂t is no longer zero when ![]() or
or ![]() are non-zero, and appropriate value of U is also dependent on
are non-zero, and appropriate value of U is also dependent on ![]() and
and ![]() . Solutions for several types of bearing have been carried out (Lund et al., 1965; Homer, 1960, Someya, 1988). In addition to the ‘spring’ and ‘damping’ coefficients introduced above, some authors have suggested the use of ‘inertia’ coefficient and ‘moment’ coefficients. Although such coefficients usually have only a small effect on bearing dynamics. Inertia coefficients can be defined as
. Solutions for several types of bearing have been carried out (Lund et al., 1965; Homer, 1960, Someya, 1988). In addition to the ‘spring’ and ‘damping’ coefficients introduced above, some authors have suggested the use of ‘inertia’ coefficient and ‘moment’ coefficients. Although such coefficients usually have only a small effect on bearing dynamics. Inertia coefficients can be defined as
(3.103) |
For perturbations in displacements, velocities, and accelerations, we have
(3.104) |
where mij is the inertia coefficients. Moment coefficients can be defined as
(3.105) |
For perturbations in the linear and angular displacements, velocities, and accelerations, we have
 |
(3.106) |
and
 |
(3.107) |
where ![]() are moment stiffness coefficients.
are moment stiffness coefficients.