with
![]()
Equation (9.77)can be written as


.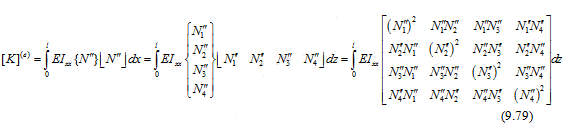
Here the prime represent the derivative with respect to the spatial coordinate, z . On substituting equation(9.62) into equation(9.79) , we get

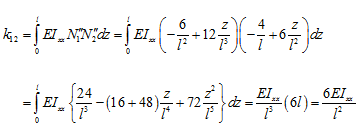
Elements of the stiffness matrix can be written as

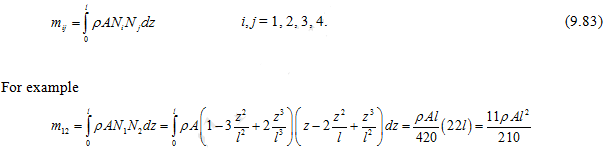
For example
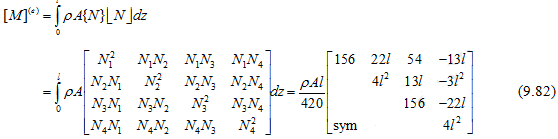
The consistence mass matrix is given as
Elements of the mass matrix can be written as
It should be noted that both the mass and stiffness matrices are symmetric. For the present formulation, we neglected the rotary inertia while deriving the equation of motion of a continuous beam. The rotary inertia terms appeared in above elemental mass matrix (corresponding to even rows and even columns) is due to consideration of element as a whole and its equivalent effects at nodes. Damping has not been considered at present in subsequent sections the Raleigh's (or proportionate) damping will be discussed.
9.5.5 The consistent load matrix
In the previous section, we derived finite element equations wherein the consistent mass and stiffness matrices were also obtained with the help of chosen shape functions. In the present section, we will be obtaining the consistent force vector for variety of loading conditions.