Similarly, for ( j +1)thelement, we have
Now the translational and rotational displacements at node ( j +1) of ( j +1)th element (i.e., at z = 0) can be written, from above equation, as
Hence, the shape function is compatible for ![]() since we obtained same value of the translational and rotational displacements at node (j +1) while considering jth and (j +1)th elements independently (i.e., from equations (9.70),(9.71) ,(9.74) and(9.75)).
since we obtained same value of the translational and rotational displacements at node (j +1) while considering jth and (j +1)th elements independently (i.e., from equations (9.70),(9.71) ,(9.74) and(9.75)).
Completeness conditions : For a cubic shape function the completeness up to the second derivative suffice the requirement of the present case, since it does not vanish on taking derivative up to second order.
9.5.4 Finite element governing equations
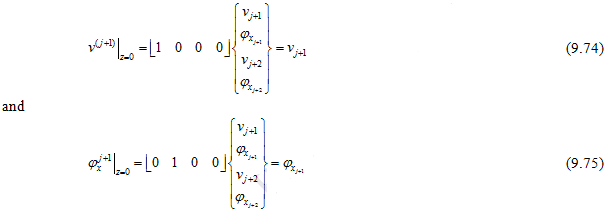
In Section 9.5.1 while formulating the week form of the elemental equation by the Galerkin's method we obtained sets of equation in the form of equation (9.52). Now assembling such equation for all values of i = 1, 2, 3 4 (i.e.,r = 4), we get
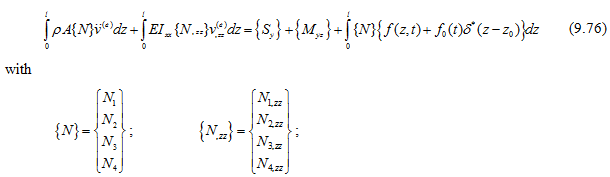
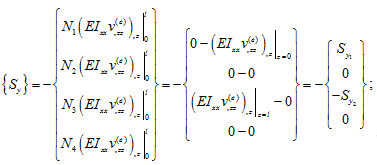
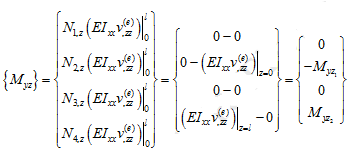
and
![]()