It should be noted that

On taking one more derivative of equation (9.64) with respect to z , we get


In view of equation(9.65) , equations (9.62)and (9.64)will take the following simple form
The above form of shape functions helps in evaluation of integral relatively easier that is required frequently at the time of calculation of the elemental mass and stiffness matrices, as we would see subsequently.
9.5.3 Satisfaction of the compatibility and completeness conditions
In previous section, we have stated the requirement of the compatibility and completeness conditions for chosen shape functions. In the present section, we will see whether the chosen cubic polynomial satisfies these conditions.
![]()
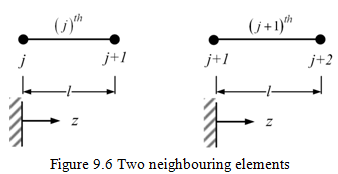
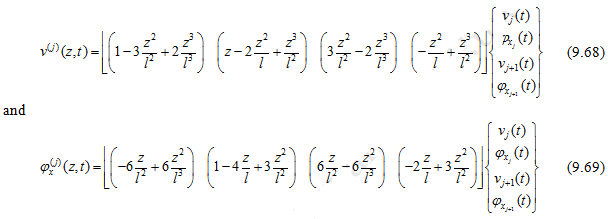
From equations (9.61)and (9.63), the translational and rotational displacements for jth element can be written as
![]()