On taking the moment balance in the free body diagram as shown in Figure 2.32 of the shaft segment for 0.6 ≤ x ≤ 1.0, we get
(b) |
The strain energy is expressed as
The linear displacement is expressed as
On substituting bending moment expression from equations (a) and (b), we get

The stiffness is given as

where ![]()
which gives the natural frequency as
![]()
It should be noted that the tilting motion of the disc has not considered. For the coupled linear and angular motions, natural frequencies of the system can be obtained as an exercise by obtaining corresponding influence coefficients.
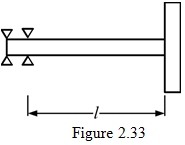
Example 2.9 Obtain the bending natural frequency for the synchronous motion of a rotor as shown in Figure 2.33. The rotor is assumed to be fixed supported at one end. Take mass of the disc m = 1 kg. The shaft is assumed to be massless and its length and diameter are 0.2 m and 0.01 m, respectively. Take shaft Young’s modulus E = 2.1 X 1011 N/m2.
Solution: Let us assume for simplicity that there is no coupling between the linear and angular motions. Considering only the linear displacement, the transverse stiffness for this case would be
(a) |
with
(b) |
Hence, the natural frequency would be
![]()
2.6 Alternative Way of Suppression of Critical Speeds
In the present section, an interesting phenomenon will be dealt in which a critical speed will be shown to be eliminated by suitably choosing system parameters. For this purpose, the Jeffcott rotor model with a disc offset has been chosen. Now, for a detailed in depth analysis, a closed form expression for the response is obtained by defining following complex displacements
(2.94) |
Equations of motion (2.81) can be written as
(2.95) |
and
(2.96) |
with ![]() . Let the solution be
. Let the solution be
where md is the mass of the disc and Id is the diametral mass moment of inertia. Let the solution be
(2.97) |
where R and Φrare the translational and rotational whirl amplitudes, respectively; Φr and Φφare the phase of the translational and rotational whirl amplitudes, respectively (these are all real quantities); so that
(2.98) |
On substituting equations (2.97) and (2.98) into equations of motion (2.95)-(2.96), we get
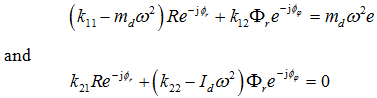 |
(2.99)
(2.100) |
Equation (2.100) can be expressed as
 |
(2.101) |
On substituting equation (2.101) into equation (2.99), we get
 |
(2.102) |
On equating the real and imaginary parts of both sides of equation (2.102), we get
 |
(2.103) |
and
 |
(2.104) |
From equation (2.104), we get
(2.105) |
which means there will not be any phase difference between the force and the response. On substituting phase information in equation (2.104), we get
 |
(2.106) |
which is the whirl amplitude and the condition of resonance can be obtained by equating the denominator of equation (2.106) to zero
(2.107) |
where ωcr represents the critical speed. By defining
(2.108) |