Unbalance forces can be simplified (i.e., by linearization) with the assumption of small angular displacement (i.e., cosφx = cosφy ≈ 1) and equations (2.67) and (2.69) can be simplified as
(2.71) |
and
(2.72) |
Now equations (2.71), (2.68), (2.72) and (2.70) are assembled as
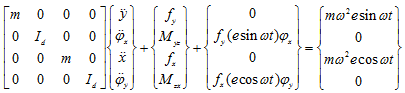 |
(2.73) |
which can be written in matrix notation as
(2.74) |
with
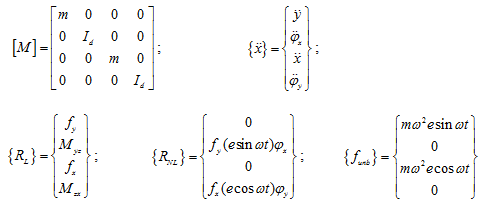
where [M] represents the mass matrix, {fumb} is the unbalance force vector, {x} is the displacement vector, {R} is the reaction force/moment vector and subscripts: L and NL represent the linear and the nonlinear, respectively. It should be noted that the ordering of the displacement vector can be changed depending upon the convenience and accordingly elements of other matrices and vectors will change their positions. The reaction forces and moments onto the shaft can be expressed in terms of shaft displacements at the disc location with the help of influence coefficients as (Timoshenko and Young, 1968)
(2.75) |
where ![]() represent the displacement at ith station due to a unit force at jth station keeping all other forces to zero. It should be noted that the displacement and force terms are used as general sense so that displacement can be a linear or an angular displacement whereas the force can be a force or a moment. The coupling of the force and the displacement in two orthogonal planes has not been considered because of the symmetry of the shaft. Equation (2.75) can be written in a matrix form as
represent the displacement at ith station due to a unit force at jth station keeping all other forces to zero. It should be noted that the displacement and force terms are used as general sense so that displacement can be a linear or an angular displacement whereas the force can be a force or a moment. The coupling of the force and the displacement in two orthogonal planes has not been considered because of the symmetry of the shaft. Equation (2.75) can be written in a matrix form as
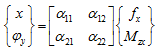 |
(2.76) |
with
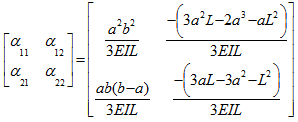
where EI is the beam flexure, length parameters a and b are defined in Figure 2.21(a) with . From the simple beam deflection theory, we can get these influence coefficients (Timoshenko and Young, 1968). Equation (2.76) can be written as
 |
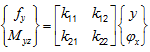
(2.77) |
where kij is the stiffness coefficient and defined as force at ith station due to a unit displacement at jth station keeping all other displacements to zero. Similarly, since the shaft is symmetric about its rotation axis, we can obtain
 |
(2.78) |
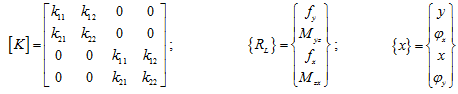
Equations (2.77) and (2.78) can be combined in matrix form as
(2.79) |
with
Noting equation (2.79), the nonlinear reaction force vector takes the following form
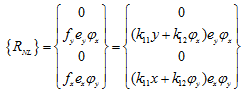 |
(2.80) |
Above equation contains product of the linear and angular displacements, which makes the system equations as nonlinear. The present analysis considers only linear systems, so contributions from these nonlinear terms can be ignored with the assumption of small displacements. On substituting reactions forces and moments from equation (2.79) into equations of motion, i.e., equation (2.74), we get
(2.81) |
with
