2.5 A Jeffcott Rotor Model with an Offset Disc
Figure 2.20(a) show a more general case of the Jeffcott rotor when the rigid disc is placed with some offset from the mid-span. With a and b locate the position of the disc in a shaft of length l. The spin speed of the shaft is considered as constant. For such rotors apart from two transverse displacements of the center of disc, i.e., x and y, the tilting of disc about the x and y-axis, i.e., φx andφy, also occurs; and it makes the rotor system as a four DOFs. For the present analysis, the rotary inertia of the disc is considered, however, the effect of the gyroscopic moment has been neglected. In Fig. 2.20(b) points C and G represent the geometrical center and the center of gravity of disc, respectively. The angle, Φ, represent the phase between the force and the response.
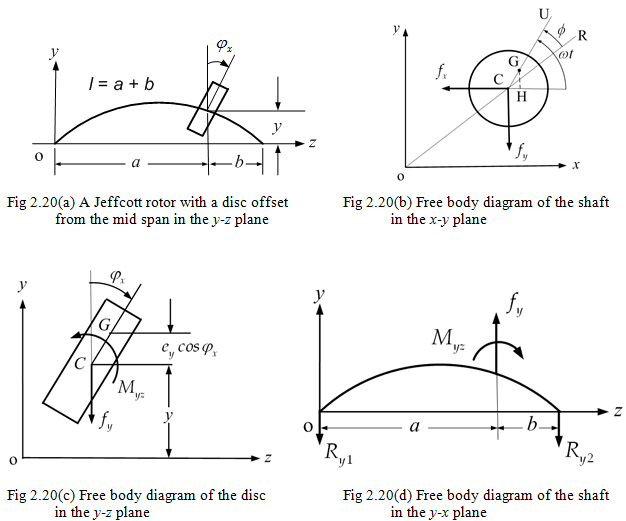
Jeffcott rotor with an offset disc
From Figure 2.20(b), we can have the following relations for the eccentricity
| (2.66) |
where ex and ey are components of the eccentricity, e, in the x and y -directions, respectively (in fact these components of eccentricity are in the plane of disc that is inclined).
From Figure 2.20(c) equations of motion of the disc in the y- and φx directions can be written as
| (2.67) |
and
| (2.68) |
where m is the disc mass, Id is the diametral mass moment of inertia about the x-axis, fy is the reaction force and Myz is the reaction moment. It should be noted that the moment is taken about the point G. From above equations it can be observed that equations are non-linearly coupled with the angular (titling) component of displacement, φx.
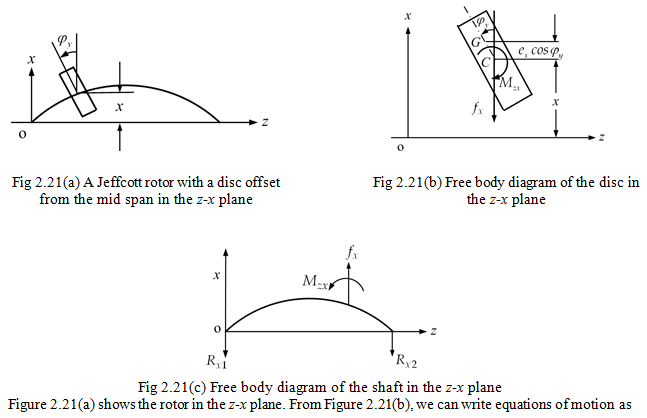
| (2.69) |
and
| (2.70) |
where Id is the diametral mass moment of inertia about the y-axis, fx is the reaction force and Mzx is the reaction moment. Equations (2.69) and (2.70) are also non-linearly coupled with the angular component of displacement, φy. However, two transverse planes (i.e. y-z and z-x) motions are not coupled and that will allow two-plane motion to analyze independent of each other, i.e., set of equations (2.67) and (2.68) and equations (2.69) and (2.70) can be solved independent of each other.