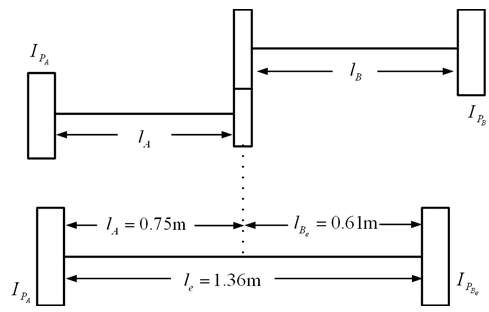
Figure 6.38 Actual and equivalent geared systems
The gear ratio for the present case will be
It is assumed that equivalent shaft (i.e., the shaft B) has the diameter same as that of the reference shaft (i.e., the shaft A). The equivalent polar mass moment of inertia and the torsional stiffness can be written as

which gives the equivalent length as

The total equivalent length and the equivalent torsional stiffness would be
![]()
and

Alternatively, the effective stiffness can be obtained as
