The polar moment of inertia of the shaft cross-section and the torsional stiffness of the shaft can be obtained as
![]()
and

On treating as a reference shaft to the shaft B and replacing an equivalent shaft system of shaft A (i.e., the same diameter as that of reference shaft B), the system will become as shown in Figure 6.34. The equivalent system of the shaft system A has the following torsional stiffness and polar mass moment of inertia properties

which gives the equivalent length of shaft A as (note that now its diameter is that of the reference shat
B)

Hence, the equivalent full shaft length is given as ![]()
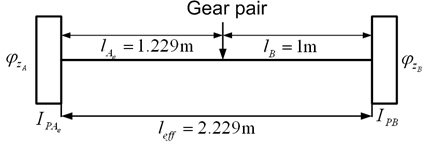
Figure 6.34 An equivalent single-shaft geared system
The equivalent stiffness of the full shaft is given as (Fig. 6.34)
