 |
Leg Actuators |
|
Actuator operating point changes depending on whether the leg is bearing the weight of the machine or not (i.e., whether the foot is on the ground or in the air). |
| |
| |
|
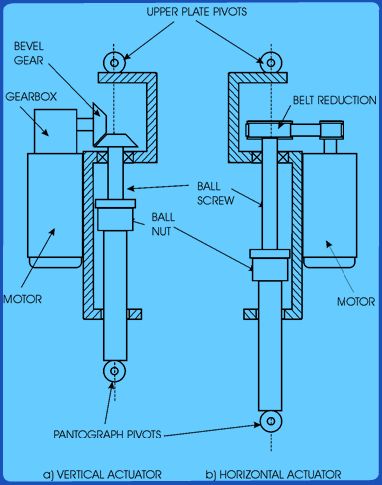
The vertical actuator is required to deliver 8750 N at 0.01 m/sec. and 389 N at 0.04 m/sec.
|
| |
|
The horizontal actuator is required to deliver 1470 N at 0.05 m/sec. and 62 N at 0.5 m/sec. |
| |
|
The performance range demanded is wider than that for the vertical actuator and can be met only by a motor whose field has been weakened for obtaining the higher speed.
|
| |
| |
|
The swivel actuator is required to deliver 13 Nm at 8 rad/sec.
|
| |
 |
| |
|