Lecture 40 : NATARAJ a case study of a 6-legged robot
Nataraj Development:
Hexapod Configuration
3 on a side (cockroach type)
symmetrically around a circle
Reason: Former has only two equally good directions of locomotion, whereas, the latter has six equally good directions.
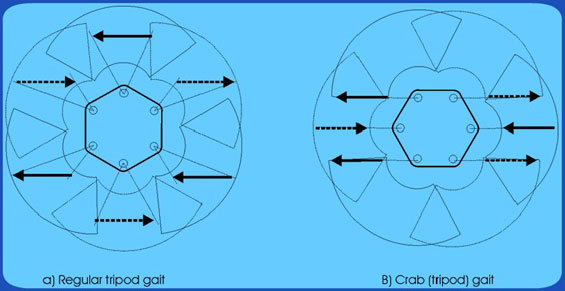
Regular and crab tripod gaits
Figure show the typical movement of legs for the two tripod gaits. For the walking machine moving towards the right, the solid arrows represent typical leg movement with respect to the body when these legs are supporting the machine. The dashed arrow, on the other hand, represents movement with respect to the body of the legs in the swing phase. Of course in actual practice, the support feet will remain fixed on the ground while the whole body will move forward towards the right.