|
Leg Design |
|
3-degrees of freedom legs
|
|
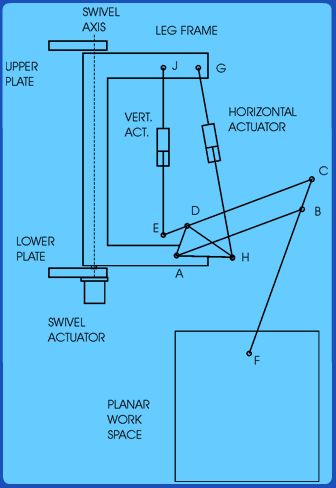
Motion in vertical plane due to two linear actuators and swivel motion of plane due to a rotary actuator |
|
The pivots A, G and J are on the leg frame that swivels about the swivel axis. ABCD forms a parallelogram five bar with fixed pivots at A. The foot is at point F. |
| |
|
The workspace of the point F, when swivel is held stationary is defined by the movement of point E. The vertical actuator is designed to remain approximately vertical. With the horizontal actuator held fixed, the foot moves along a line parallel to line EJ with the foot moving in the opposite direction to direction of movement of point E in the ratio 5:1.
|
| |
|
With the vertical actuator fixed the foot moves along an arc of circle with five times the radius of length of the vertical actuator, i.e., approximate radius of 2m. Therefore, the planar workspace of the foot is approximately rectangular. |
| |
| |
|