|
Mobile Robots |
|
The focus of the course has been on Industrial robots, which are by and large fixed robots. However, there are many instances when one would like to have a mobile robot. |
| |
|
A mobile robot is a robot that is capable of going from one place to another.
|
|
Some capabilities required in a mobile robot are: |
| |
|
Means of locomotion, i.e., wheels, legs, wings, etc.
|
| |
|
Navigation, i.e., line following, target seeking, obstacle avoidance, navigation using maps, map building, self localization, etc.
|
| |
|
|
| |
|
|
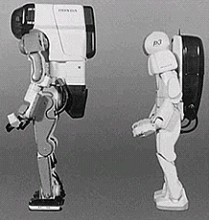
Some early humanoid robots |
| |
Legged Robots |
| |
Advantages |
Flamingo a biped using serial elastic actuators
Leg Lab MIT
|
|
Prepared surface not essential
|
|
Continuous surface not essential
|
|
Legged mobile robots can work in environments designed for human beings where wheeled robots cannot be used.
|
| |
|
Active suspension
|
|
Can be made contaminant proof by clothing
|
| |
Disadvantages:
|
|
Greater complexity of hardware
|
|
Greater demand on actuator due to self weight |
|
Greater complexity of control and coordination
|
| |
|
|