 |
Leg workspace
and margin of stability |
|
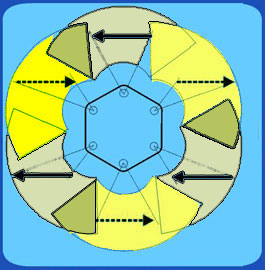
The regions where possible foothold locations for the six legs could lie are sectored annular regions. These regions are allowed to overlap for the neighbouring legs. |
| |
|
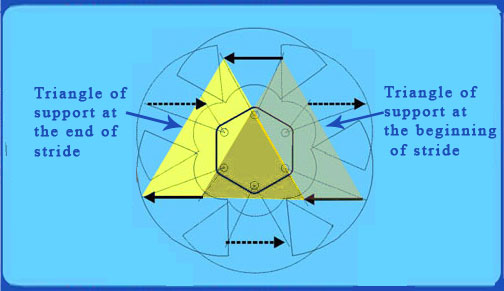
For tripod gait, The leg stride is limited so as to achieve sufficient stability margin (i.e., measure of how close the CG of the machine comes to the edge of a triangle of support. In the second figure, two triangles of support are shown corresponding to the extreme positions of the support legs. The stability margin is also indicated for the two positions as green and yellow arrows, respectively.
|
| |
|
|
| |
|
|