|
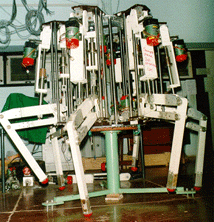
Nataraj Robot |
| |
Design issues |
|
Hexapod Configuration
|
|
|
Leg design
|
|
Interference between legs. |
|
Multiple gaits |
|
Stability margins |
|
Actuation
|
|
Control
|
| |
|
| |
Nataraj Development :
Specifications |
| |
Motivation for developing Nataraj: |
|
|
For work in Hazardous unstructured
environment (Nuclear power plants)
|
| |
|
Affordable indigenous technology
|
| |
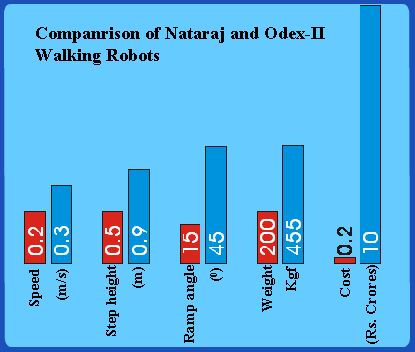
Broad specifications for Nataraj:
|
|
Walking speed 0.2 m/s on level ground
|
|
Climb steps of 0.5 m height
|
|
Climb ramps of 15 deg incline
|
|
Weight 200 Kgf with standard payload
|
|
Prototype development in Rs. 2 millions |
| |
In contrast specifications of Odex are: |
|
Walking speed of 0.3 m/s on level ground, |
|
Climb steps of 0.9 m height
|
|
Climb ramps of 45 deg incline.
|
|
Weight 455 Kgf with the standard payloads
|
|
Cost US$ 2 millions
|
| |
|