Lecture Note 4
Additional Notes
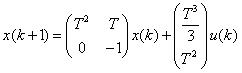
Example 1: The state model is given by
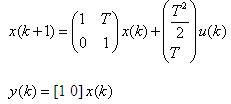
Design the first order estimator for the initial error to be dead beat. Draw the estimator simulation diagram.
Solution:
The dynamics of the reduced order estimator in matrix form is given by

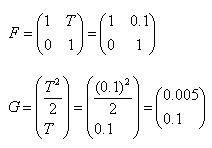
On comparison with given dynamics we yield
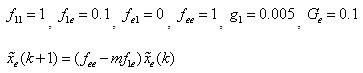
Since
![]()
Here the order (n) of F matrix = 2
![]()
As given that error to be dead beat, so
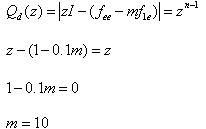
Finally, the dynamics of the reduced order estimator is given by

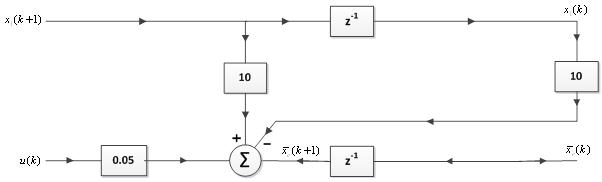
The estimator simulation diagram is shown below
Points to Remember:
a. If the order of F matrix is 1 or 2 then calculate the value of m by using the formula
![]()
b. If the order of F matrix is greater than equal to 3 then calculate the value of m by using the formula

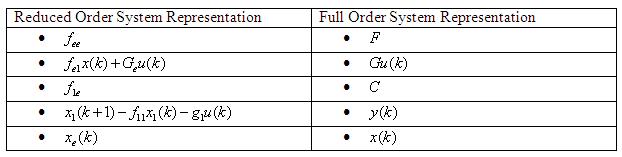
c. The tabular representation of comparison between the reduced order and full order system as shown below:
Exercise Problem
Problem 1: The state model is given by
Design the first order estimator for the initial error which should be dead beat. Draw the estimator simulation diagram.