Exercise Problems
Problem 1: Given state feedback gain of the controller k = [-0.246 0.246] also the F, G and C matrices are
Determine the Nx,, output of the system, reference input applied to the system and show it by hardware implementation.
Problem 2: Given that
Determine the Nx , Nu by using the feed forward design technique.
Problem 3: Given the transfer function as
![]()
Design a tracking system with an integrator such that the design characteristic equation is given by
![]()
Lecture Note 3
Additional Notes
Types of Estimators/Observers:
There are two types of estimators on the basis of past and present conditions. These are
1 Prediction Estimator
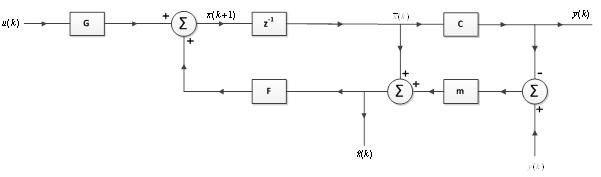
By its name it clarifies that estimator which is used for the prediction of past values of the original system output with the current values of the estimator which is given by
![]()
Here the m represents the controller gain which is calculated by the algebraic sum of outputs of estimator and original system
The block diagram represents the above mentioned equation by the state space analysis is given by