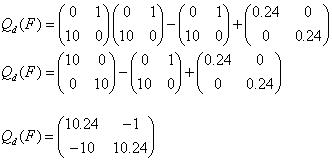
The closed loop poles are located at 0.4 and 0.6. So the characteristic equation is given by
![]()
![]()
From Ackermann's Formula we get
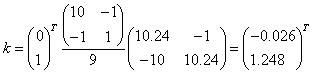
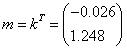
Hence, the transpose of the state feedback gain yields the controller gain of estimator.
Exercise Problems
Problem 1: The State model of the system is given by

Predict the system is observable or not. And also determine the controller gain of estimator of Luenberger state estimator by using Ackermann's formula when closed loop poles are located at 0.2 and 0.8 respectively.
Problem 2: The state model is given by

The desired poles of the estimator are located at z = 0.8+0.2 j and 0.8-0.2 j respectively. Assume the time T=0.5sec. Draw the estimator simulation diagram.