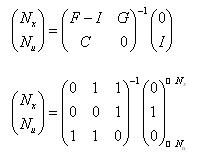
Limitation: The above determined matrix can be represented as
![]()
The transfer function of the closed loop system is given by
![]()
The steady state gain of the uncompensated system
![]()
![]()
Where SSG is steady state gain of the system.
Here, the steady state gain in this system is non-zero.
Example: Given that

 c = [1 1]
c = [1 1]
Determine the Nx , Nu by using the feed forward design technique.
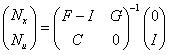
Solution :
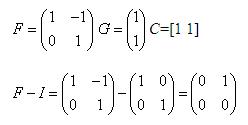
From above calculated formula we have