From the standard characteristic equation of closed loop poles, we have
![]()
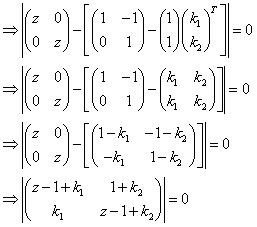
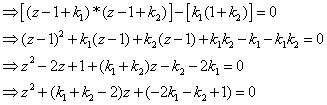
On comparison with standard equation, we get
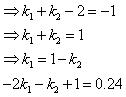
![]()
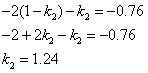
![]()
k= [-0.24 1.24]
These values of the system gain represent the two controller parameters which are feedback to reference input. Finally the matrix form of the state feedback gain of the controller is given above respectfully.