2 Current Estimator
Meanwhile, the current estimator was designed to calculate the present condition output of the original system respectively .This basically used in sampling type function in real time application.
The dynamics of the current estimator is given by
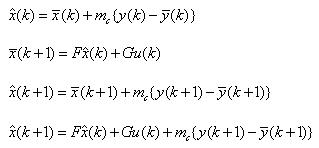
The relationship between the current and the prediction estimator is given by
if and only if
![]()
![]()
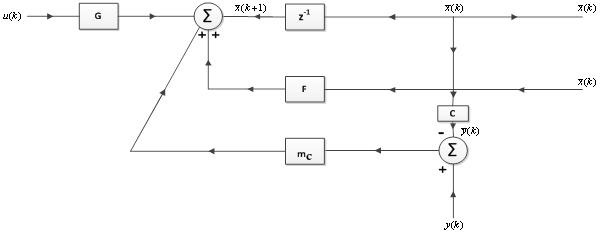
The block diagram is given by
Example 1: The State model of the system is given by
![]()
Predict the system is observable or not. And also determine the controller gain of estimator of Luenberger state estimator by using Ackermann's formula when closed loop poles are located at 0.4 and 0.6 respectively.
Solution:
The observability matrix is given by


Hence determinant is non zero so the pairs( F,G ) is observable.
The observer dynamics is given by
![]()
The controllability matrix is given by