Exercise Problems:
Problem 1: Given that
 ,
, 
Design a state feedback controller such that the closed loop poles are located at z = 0.6 ± 0.4 j .
Problem 2: The F and G matrices are given below

Design a state feedback controller using the transformation matrix that transforms the system into controllable canonical form in such a way that closed loop poles are located at z = 0.2 & z = 0.8.
Problem 3: Following F and G matrices of order 2 are given by


Determine the state feedback gain by using Ackermann's Formula.
Lecture Note 2
Additional Notes
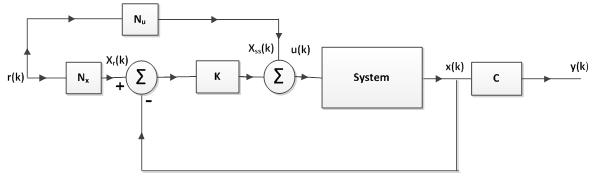
Feed Forward Gain Design Using Steady State Input:
Block diagram is given below
![]()
This type of designing is generally preferred to “nullify the offset at the input”.
Where
![]()
The output is given by
![]()
At steady state
![]()
![]()
![]()
![]()
![]() ..............................................................................................................1
..............................................................................................................1
From the state equation we have
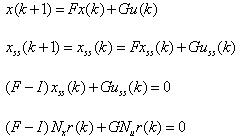
![]() ..............................................................................................2
..............................................................................................2
The equation 1 and 2 can be represented in matrix form as
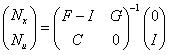 ......................................................................................3
......................................................................................3