Exercise 4.9 Consider equations of motion of exercise 4.7 and numerical data given in Table E4.8. Obtain the response (i.e., the amplitude and the phase) of the bearings with respect to the rotor speed and list down critical speeds of the rotor-bearing system.
Exercise 4.10: For the case when a rigid rotor, mounted on two bearings at ends, as shown in Fig. E4.10, has varying cross section along the longitudinal axis (e.g., a tapered rotor). For this case the centre of gravity, G, of the rotor will be offset from the mid-span of the rotor, C. It is assumed that the rotor is perfectly balanced (i.e., it has no external radial force and corresponding external moment). Let m be the mass, Id be the diametral mass moment of inertia of the rotor about centre of gravity, kA and kB are stiffness of bearings A and B respectively, and l is the length of the rotor. Obtain governing equations of motion for the following three sets of chosen generalized coordinates for a single plane motion of the rotor.
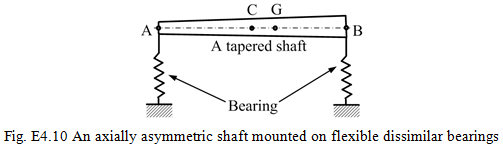
- If we choose generalized coordinates as (xG, φz), where the linear displacement of the centre of gravity is xG, and tilting of the rotor from the horizontal (i.e., z-axis) is φz.
- If we choose generalized coordinates as (xE, φz), where the linear displacement of a point on the rotor where if a transverse force is applied then it produces pure translation of the rotor (i.e., kAlAE = kBlBE) is xE, and tilting of the rotor remains same as for the first case.
- If we choose generalized coordinates as (xA, φz), where the linear displacement of the extreme left end of the rotor is xA, and tilting of the rotor remains same as for the first case.
- If we choose generalized coordinates as (xA, xB), where the linear displacement of the extreme left and right ends of the rotor are xA, and xB, respectively.
- If we choose generalized coordinates as (xC, φz), where the linear displacement of the mid-span is xC, and tilting of the rotor from the horizontal (i.e., z-axis) is φz.
- If we choose generalized coordinates as (xE, xG), where displacements have similar meanings as defined previously.
[Answer:
 ; where the subscript in l represents corresponding length. The mass matrix is uncoupled and the stiffness matrix is coupled, i.e., the static coupling exists.
; where the subscript in l represents corresponding length. The mass matrix is uncoupled and the stiffness matrix is coupled, i.e., the static coupling exists. ; The stiffness matrix is uncoupled and the mass matrix is coupled, i.e., the dynamic coupling exists.
; The stiffness matrix is uncoupled and the mass matrix is coupled, i.e., the dynamic coupling exists. ; The mass and stiffness matrices are uncoupled, i.e., both the static and dynamic coupling exists.
; The mass and stiffness matrices are uncoupled, i.e., both the static and dynamic coupling exists. ; The mass and stiffness matrices are non-symmetric and coupled.
; The mass and stiffness matrices are non-symmetric and coupled. ; The mass and stiffness matrices are non-symmetric and coupled.
; The mass and stiffness matrices are non-symmetric and coupled.
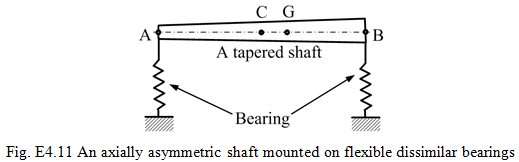
Exercise 4.11 For a perfectly balanced rigid rotor mounted on flexible bearings as shown in Fig. E4.11 the following data are given: m = 10 kg, Id = 0.015 kg-m2, l = 1m, lAG = 0.6m, kA = 120 kN/m, kB = 140 kN/m. Consider one plane motion with two-DOFs and coupling in the generalized coordinates. Obtain the transverse natural frequencies and mode shapes of the rotor-bearing system.
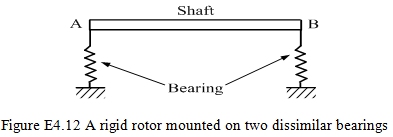
Exercise 4.12 Obtain transverse natural frequencies of a rotor-bearing system as shown in Figure 4.12 for pure translatory motion of the shaft. Consider the shaft as a rigid and the whole mass of the shaft is assumed to be concentrated at its mid-span. The shaft is of 1 m of span and the diameter is 0.05 m with the mass density of 7800 kg/m3. The shaft is supported at ends by flexible bearings. Consider the motion in both the vertical and horizontal planes. Take the following bearing properties: for both bearing A & B: kxx = 200 MN/m, kyy = 150 MN/m, kxy = 15 MN/m, kyx = 10 MN/m.
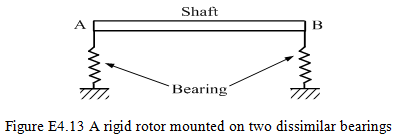
Exercise 4.13 Obtain transverse critical speeds of a rotor-bearing system as shown in Figure 2, for pure tilting motion of the shaft. Consider the shaft as a rigid and the whole mass of the shaft is assumed to be concentrated at its mid-span. The shaft is of 1 m of span and the diameter is 0.05 m with the mass density of 7800 kg/m3. The shaft is supported at ends by flexible bearings. Consider the motion in both the vertical and horizontal planes. Take the following bearing properties: for both bearing A &B: kxx = 20 MN/m, kyy = 15 MN/m, kxy = -1.5 MN/m, kyx = 5 MN/m.
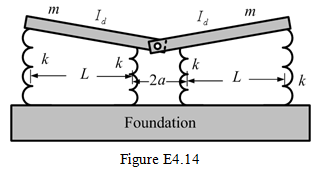
Exercise 4.14 Obtain equations of motion (put them in expanded matrix form) for transverse vibration of a rotor-bearing-coupling system as shown in Fig. Figure E4.14. Two identical rigid rotors are connected by a coupling (a pin joint or a universal joint) and are supported on four bearings (modelled as springs with each has a stiffness of k) as shown in figure. Choose appropriately generalised coordinates to define the motion of the system. In figure, L is the distance between the bearings and a is the overhang portion of each rotor. Consider a single plane motion of the system.