2.2 A Single-DOF Damped Rotor Model
In the previous section the damping was ignored in the rotor model and now in the present section its effects would be considered (see Fig. 2.8a). The simplest damping model is the viscous (or proportional) damping and the damping force is expressed as
| (2.12) |
where c is a constant of proportionality and is called the viscous damping coefficient.
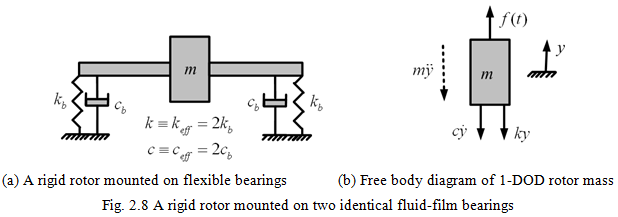
In Fig. 2.8a a rigid rotor mounted on two identical fluid-film bearings is considered as single-DOF system. From the free body diagram (Fig. 2.8b) of the rotor equations of motion could be written as
| (2.13) |
For the free damped motion (i.e., for a perfectly balanced rotor), equation (2.13) takes the form
| (2.14) |
Let us assume a solution of the form
| (2.15) |
where s is an unknown parameter (may be a complex number) and t is the time instant, so that ![]() and
and ![]() . On substituting equation (2.15) in equation (2.14), we get
. On substituting equation (2.15) in equation (2.14), we get
| (2.16) |
Hence, from the condition that equation (2.15) is a solution of equation (2.14) for all values of t, equation (2.16) gives the following characteristic equation
| (2.17) |
which can be solved as
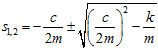 |
(2.18) |
Hence, the following form of the general solution is obtained
| (2.19) |
where A and B are constants to be determined from initial conditions of the problem (e.g., y(0) = y0 and ![]() ). On substituting equation (2.18) into equation (2.19), we get
). On substituting equation (2.18) into equation (2.19), we get
 |
(2.20) |
The term outside the bracket in right hand side is an exponentially decaying function for positive value of c. However, the term ![]() can have following three cases:
can have following three cases:
(i) ![]() : Exponents of terms within the square bracket in equation (2.20) are imaginary numbers
: Exponents of terms within the square bracket in equation (2.20) are imaginary numbers  , which means, we can write
, which means, we can write  . Hence, equation takes the following form
. Hence, equation takes the following form

Let a = (A + B) = Y cosΦ and b = i(A - B) = Y sinΦ, we get
 |
(2.21) |
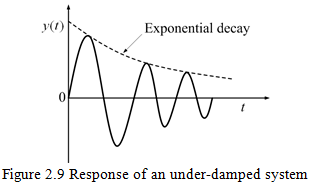
where Y andΦ are the amplitude and phase. For the present case oscillations are possible (with decaying type) and it is called the under-damped system (Fig. 2.9). The damped natural frequency is given as