2.1.1 Unbalance force model: If the rotor is perfectly balanced then theoretically speaking there will not be any unbalance force as shown in Figure 2.2(a), where C and G are the center of rotation (or the geometrical center) and the center of gravity of the rotor, respectively. However, in actual practice it is impossible to have a perfectly balanced rotor and cases would be as shown in Figures 2.2(b)-(d),where U is the location of an additional unbalance mass (for example a small screw attached to the disc). The unbalance may come due to manufacturing tolerances, operational wears and tears, thermal distortions, repair, etc. The rotor unbalance gives a sinusoidal force at the rotor spin speed. Thus, the unbalance force is modeled as a sinusoidal force
| (2.1) |
where m is the mass of the rotor, ω is the spin speed of the rotor, e is the eccentricity of the rotor (i.e., e = CG, see see Figure 2.2(b)) and the product me is normally called the unbalance. The above unbalance force will come when the rotor is eccentric, i.e., the rotor center of rotation and the center of gravity are not coincident. This type of unbalance is called the residual or inherent unbalance.
When the rotor is not eccentric (i.e., when C and G are coincident), and a small unbalance mass, mi is attached at a relatively larger radius of ri = CU as shown in Figure 2.2(c), the unbalance force can be written as
| (2.2) |
The above type of unbalance, miri, is called the trial, correction or additional unbalance and it is often used for the residual unbalance calculation using dynamic balancing procedures. For the case when the rotor is eccentric and a small trial unbalance mass is attached as shown in Figure 2(d), the total unbalance force would be
| (2.3) |
where Φ is the angular phase difference between the vectors of unbalance forces due to the rotor eccentricity and the trial unbalance mass. For the CCW rotation of the rotor as shown in Fig. 2.2(d), the trial mass unbalance (CU) is lagging by phase angle of Φ with respect to the residual mass unbalance (CG).
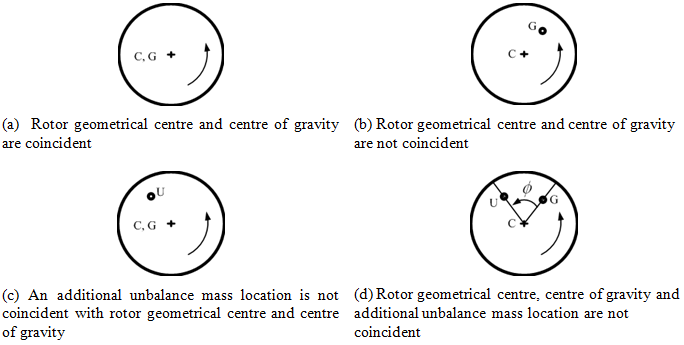
Figure 2.2 Different types of unbalances in a single plane