Choi and Noah (1987) presented a numerical method which combined the harmonic balance method with discrete Fourier transformation and inverse discrete Fourier transformation. Their numerical results showed the occurrence of super- and subharmonics in a rotor model involving a bearing clearance. Choi and Noah (1994) examined the complex dynamic behaviour of a simple horizontal Jeffcott rotor with bearing clearances. Numerical results revealed that alternating periodic, aperiodic, and chaotic responses is governed by the rule of the Farey number tree. There are mode-locking tongues in the parameter space and within each mode-locking tongue, a number of smaller tongues exist where a sequence of period doubling bifurcations leading to chaos takes place. Kim and Noah (1990) used a modified Jeffcott model to determine the onset of aperiodic whirling motion using bifurcation theory.
Adams and Abu-Mahfouz (1994) discussed the chaotic motions of a general rub-impact rotor model. The influence of clearance variation was observed, and responses rich in sub-harmonic, quasi-periodic and chaotic motions were obtained over a wide range of operating parameters. Ehrich (1994) analyzed the rotor dynamic response in non-linear anisotropic mounting systems which represented a rotor system in local contact with the stator. He found the chaotic response in transition zones between successive super-harmonic orders. In Isaksson’s paper (1994), the “jump” phenomenon and the influence of radial clearance were investigated. Chu and Zhang (1997) performed a numerical investigation to observe periodic, quasi-periodic and chaotic motions in a rub-impact rotor system supported on oil film bearings. Routes to and out of chaos were analyzed. Chancellor et al. (1998) discussed a method of detecting parameter changes of a piecewise-linear oscillator using analytical and experimental non-linear dynamics and chaos. Movement of the unstable periodic orbits in phase space was used to detect parameter changes in the system. This suggested a possible way for the future fault diagnostics.
Based on these researches it is not so difficult to judge whether a rotor system has rubbing or not. For partial rub the vibration waveform of the rotor will have truncation. When the rub is developed into full rub, the rotor vibration shows backward orbiting, this is a special feature to identify the rotor-to-stator rub, distinguishing this malfunction from the others. However, for the diagnostics purpose, it is still a difficult task to detect the rubbing position. Wang and Chu (2001) presented an experimental method to detect the rubbing location. The method combined the acoustic emission technique with the wavelet transform. The results showed the method to be very effective. Chu and Lu (2002) discussed a so-called dynamic stiffness method to detect the rubbing location. The simulation results showed the method to be very effective as well. Peng et al. (2003) analyzed the feature extraction of the rub-impact system for the fault diagnostics by means of the wavelet analysis. Similar to this kind of nonlinear system with piecewise linear feature, Hinrichs et al. (1999) investigated an impact oscillator and a self-sustained friction oscillator by experiments and numerical simulation. Point-mapping approaches, Lyapunov exponents and phase space reconstruction were used to analyze dynamics of the systems and rich bifurcational behavior was found.
Bapat (1998) discussed N impact periodic motions of a single-degree-of-freedom oscillator. For some simple cases, exact closed-form expressions were obtained. Effects of amplitude and frequency of sinusoidal force, bias force, damping, and variable and constant coefficients of restitution on periodic motions were investigated. Begley and Virgin (1998) investigated the interaction and influence of impact and friction on the dynamic behavior of a mechanical oscillatory system. Dynamical system theory was used as a conceptual framework and comparisons were made between numerical and experimental results over a relatively wide range of parameters. An experimental setup was installed to simulate the rotor-to-stator rub of the rotor system by Chu and Lu (2005). A special structure of stator is designed that can simulate the condition of the full rub. The vibration waveforms, spectra, orbits and Poincaré’s maps are used to analyze nonlinear responses and bifurcation characteristics of the system when the rub-impact occurs. Experiments with different conditions, including one and two rotor with single- and multi-disks, were performed. Very rich forms of periodic and chaotic vibrations were observed. The experiments show that the system motion generally contains the multiple harmonic components such as 2×, 3×, etc. and the 1/2 fractional harmonic components such as 1/2×, 3/2×, etc. Under some special conditions, the 1/3 fractional harmonic components such as 1/3×, 2/3×, etc. were observed.
In practice, the rubbing can be detected indirectly by measuring regularly the rundown time of the turbines. Due to rubbing rundown time is expected to reduce drastically.
15.5 Mechanical Looseness of Components
Mechanical looseness, the improper fittings between component parts, is generally characterized by a long string of harmonics of running frequency with abnormally high amplitudes. In some machines vibration levels may be excessive as a consequence of components being assembled too loosely, for example in the case of a bearing, which is not properly secured. The vibration signal detected from a transducer is normally a sine wave, but is truncated at one extremity as shown in Figure 15.10(a). The truncation of the sine wave occurs because of the non-linearity of, for example, the bearing mount that suddenly becomes very stiff when the loose component reaches the limit of its allowable levels. In frequency domain, these truncations (impulses) show up as a series of harmonics of rotational frequency (Figure 15.10(b)). The 2 x machine running speed component is usually the harmonic most easily detected. In cases where it is the bearing, which is not properly secured, the shaft average support stiffness over one cycle is effectively reduced. When the shaft speed is less than 2 x normal resonant frequency, the reduction in shaft support stiffness acts to lower the resonant frequency to ½ x shaft rotational speed so that vibration at this frequency becomes significant. A similar effect may occur with other sub-harmonics of rotational speed. (i.e., 1/3, 1/4, etc.).
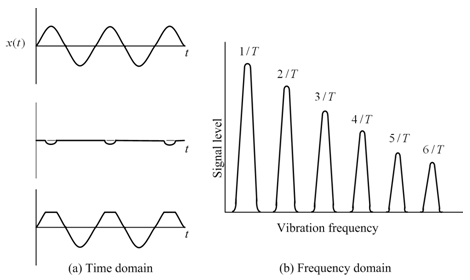
Figure 15.10 Signal with loose component (a) Time domain (b) Frequency domain
Pedestal looseness is one of the common faults that occur in rotating machinery. It is usually caused by the poor quality of installation or long period of vibration of the machine. Under the action of the imbalance force, the rotor system with pedestal looseness will have a periodic beating. This will generally lead to a change in stiffness of the system and the impact effect. Therefore, the system will often show very complicated vibration phenomenon. In the case of rotor/bearing/stator systems, the dynamic phenomena (which include chaotic and orderly periodic motion of system elements), occur usually as secondary effects of a primary cause. This primary cause is most often an action of the rotor unbalance related rotating force, directly exciting rotor lateral vibrations, and/or the unilateral, radial force applied to the rotor. The latter may result from rotor misalignment, fluid environment side load (as in single volute pumps), or gravity (as in horizontal rotors). For example, the looseness in a machine pedestal joint, or in an oversize bearing, would not be noticed until the rotating unbalance force, which periodically acts vertically up, exceeded the gravity force that pressed the joints into close contact. In the rotor-to-stator rub case, the unwelcome rotor-to-stator contact occurs when the rotor is moved to the side due to increased radial force, or when amplitudes of its lateral, precessional motion exceeded allowable clearances.
There have been very few publications on this topic. Goldman and Muszynska (1991) performed experimental, analytical and numerical investigations on the unbalance response of a rotating machine with one loose pedestal. The model was simplified as a vibrating system with bi-linear form. Synchronous and subsynchronous fractional components of the response were found. Muszynska and Goldman (1995) presented the analytical, numerical, and experimental simulation of unbalanced rotor/bearing/stator systems with joint looseness or rubbing. The vibrational behavior of such systems is characterized by orderly harmonic and subharmonic responses, as well as by chaotic patterns of vibrations. The main frequency responses were usually accompanied by a spectrum of higher harmonics. Vibration characteristics of a rotor-bearing system with pedestal looseness were investigated by Chu and Tang (2001). A non-linear mathematical model containing stiffness and damping forces with tri-linear forms was considered. The shooting method was used to obtain the periodic solutions of the system. Stability of these periodic solutions was analyzed by using the Floquet theory. Period-doubling bifurcation and Naimark-Sacker bifurcation were found. Finally, the governing equations were integrated using the fourth order Runge-Kutta method. Different forms of periodic, quasi-periodic and chaotic vibrations are observed by taking the rotating speed and imbalance as the control parameter. Three kinds of routes to or out of chaos, that is, period-to-chaos, quasi-periodic route and intermittence, were found.