In case of a full rub, the shaft may no longer make contact with the stationary member only at local high spots, but instead bounce its way all around its orbit, for example in case of severe misalignment or due to severe unbalance which produces large unbalance response in the rotor. The main component is at 1 x rotational speed; harmonics and sub-harmonics may also be present. Alternatively, the tangential friction force between shaft and stationary component may be so large that it results in a backward precession of the shaft around the inside of the stationary component together with substantial slipping.
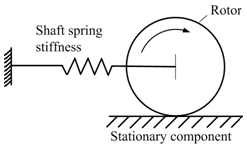
Figure 15.8 An equivalent stick-slip rub in rotor-bearing system
A rub may also give rise to stick-slip action of the shaft against the stationary components (similar to the Coulomb friction in which for a positive direction velocity friction force acts in negative direction and vise a versa). It is a vibration set-up as a consequence of the friction coefficient between shaft and stationary component changing with relative velocity. In Figure 15.8 the rotor rotation initially causes it to roll over the stationary component so that its center moves from left to right. When the spring force in the shaft is equal to the friction force that initiates the motion then the rotor starts to slip over the stationary component instead of rolling over it. At this moment there is change in friction coefficient which leads to a smaller friction force and the rotor now moves from right to left, overshoots the point where the new friction force is equal the shaft spring force because of the inertia of the rotor. At some point the rotor starts moving from right to left and instead begins to roll on the stationary component once more, and the cycle of events starts again. The vibrational frequency is usually much higher than the shaft rotational frequency (Fig. 15.9), and the fault frequently shows up as a torsional vibration as well as a lateral one. In case where rubs cannot be avoided by increasing clearance then either the rotor surface or that of stationary component should be manufactured from a soft material which will easily wear away, this will help to avoid the backward precession. The situation may be avoided by lubricating the area of contact. Also by using very stiff rotor and flexible mounted stator the above situation can be avoided.
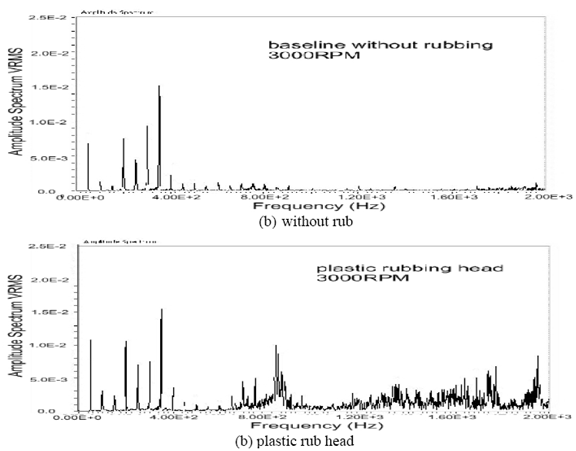
Fig. 15.9 The effect on the spectrum due to rub in rotor
Rotor-to-stationary element rub is a serious malfunction in rotating machinery that may lead to a catastrophic failure. Choy and Padovan (1987) developed a general analytical rub model using the following assumptions: (i) simple Jeffcott rotor model, (ii) linear stiffness and damping characteristics, (iii) rigid casing supported by springs acting in the radial direction, (iv) mass inertia of the casing small enough to be neglected, (v) simple Coulomb friction and (vi) onset of rub caused by unbalance. Using the above assumptions, the rubbing period was categorized into four distinct processes: (a) non-contact stage, (b) rub initiation, (c) rub interaction and (d) separation. The effect of including torsion in the numerical analysis of a contacting rotor/stator system was investigated by (Edwards, et al., 1999). Two sets of data were obtained for the same physical model, with and without the inclusion of torsion. System response with respect to torsional stiffness has also been examined. The results presented showed that, for a realistic physical system, periodic non-linear and also chaotic motion can occur. Rub-impact between rotor and stator is one of the main serious malfunctions that often occur in rotating machinery. It shows a very complicated vibration phenomenon, including not only periodic (synchronous and non-synchronous) components but also quasi-periodic and chaotic motions. A comprehensive investigation on the dynamic characteristics exhibited by this kind of system forms the basis to diagnose accurately this form of fault.
Rotor-stator rub in a rotating assembly has attracted great concerns from researchers. There have been numerous publications on this topic. Shaw and Holmes (1983) discussed a periodically forced piecewise linear oscillator in a more mathematical way. Their results showed harmonic, sub-harmonic and chaotic motions. This type of oscillator can be derived from a rub-impact model and the discussion has a representative meaning. Muszynska (1984) analyzed the physical phenomena related to partial lateral rotor to stator rub. Through using a periodic step function the analysis showed the existence of harmonic vibrations in the order 1/2, 1/3, 1/4, …; experiment also confirmed the results. Beatty (1985) suggested a mathematical model for rubbing forces which were non-linear with a piecewise linear form. The model is still widely used today. Through theoretical simulation and laboratory verification he concluded some points for diagnosing this fault. Thompson and Stewart (1986) studied an impact oscillator. The oscillator is shown to exhibit complex dynamic behaviour including period-doubling bifurcation and chaotic motions. Choy and Padovan (1987) performed a very interesting theoretical investigation to observe the effects of casing stiffness, friction coefficient, unbalance load and system damping on rub force history, and the transient response of rotor orbit.
Muszynska (1989) presented literature survey that gave a list of previous papers on the rub-related vibration phenomena. Dynamic phenomena occurring during rubbing such as friction, impacting, stiffening and coupling effects were discussed in the paper. She discussed the physical meaning and the thermal effect of rub, various phenomena during rubbing, analysis and vibration response of rubbing rotors, and other related phenomena. Thermal effects, friction, impact, coupling, stiffening, analysis and vibrational response are included; the paper represents the first comprehensive review of the subject.