In this lecture we will discuss about the relation between transfer function and state space model for a discrete time system and various standard or canonical state variable models.
1 State Space Model to Transfer Function
Consider a discrete state variable model
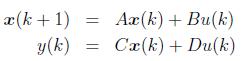 |
(1) |
Taking the Z-transform on both sides of Eqn. (1), we get
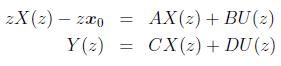 |
where
![]() is the initial state of the system.
is the initial state of the system.

To find out the transfer function, we assume that the initial conditions are zero, i.e.,  , thus
, thus

Therefore, the transfer function becomes
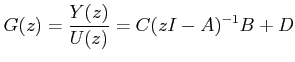 |
(2) |
which has the same form as that of a continuous time system.