1. Pluse Transfer Function
Transfer function of an LTI (Linear Time Invariant) continuous time system is defined as
where R(s) and C(s) are Laplace transforms of input r(t) and output c(t). We assume that initial condition are zero.
Pulse transfer function relates Z-transform of the output at the sampling instants to the Z- transform of the sampled input.
When the same system is subject to a sampled data or digital signal r*(t), the corresponding block diagram is given in Figure 1 .
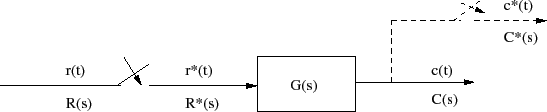
The output of the system is C(s) = G(s)R*(s). The transfer function of the above system is difficult to manipulates because it contains a mixture of analog and digital components. Thus, for ease of manipulation, it is desirable to express the system characteristics by a transfer function that relates r*(t) to c*(t), a fictitious sampler output, as shown in Figure 1.