The following numerical example demonstrates the efficacy of a feedforward-feedback controller. Consider a process having process and disturbance transfer functions as
(V.19) |
A feedback PID controller,with ![]() , is used to control the process for disturbance rejection purpose. A feedforward controller has also been designed for the process however it has been assumed that the time constant of the process has been measured erroneously as 2.1 instead of 2. A first order filter with time constant 0.1 has been augmented to the transfer function of Gsp in order to make it causal.
, is used to control the process for disturbance rejection purpose. A feedforward controller has also been designed for the process however it has been assumed that the time constant of the process has been measured erroneously as 2.1 instead of 2. A first order filter with time constant 0.1 has been augmented to the transfer function of Gsp in order to make it causal.
A Simulink code (Fig V.6) has been generated to simulate the process under the three types of controllers as said above.
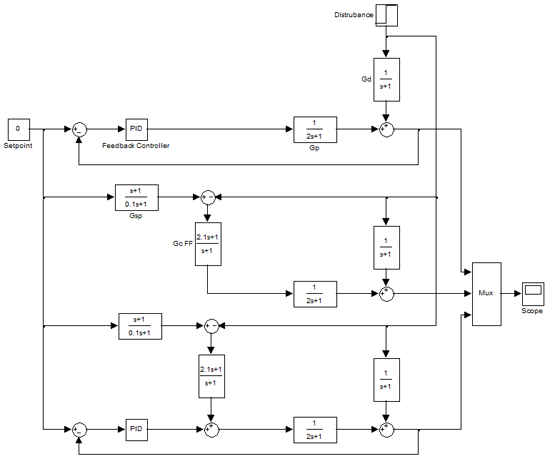
Fig V.6: Block diagram of Simulink code for closed-loop process under three controllers |