Let us now explore how a combination of feedforward and feedback controller would perform when they are designed to act simultaneously. The schematic of a feedforward-feedback controller is shown in Fig V.5.
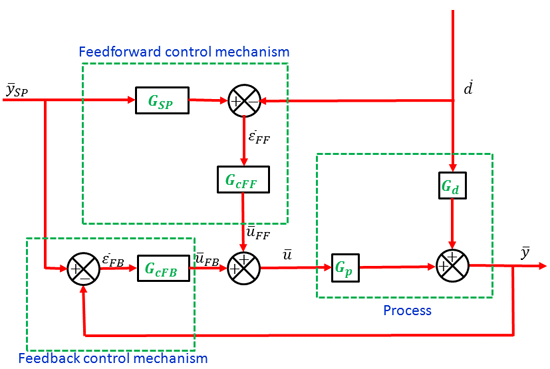
Fig V.5. The schematic of a feedforward-feedback controller
Without losing the generality we shall ignore the transfer functions of the measuring element and the final control element.
Now the closed loop transfer function of feedforward-feedback controller can be derived in the following manner:
(V.17) |
Rearranging the above we get,
(V.18) |
It is observed that the stability of the closed loop response is determined by the roots of the characteristic equation:![]() . Hence, the stability characteristics of a process does not change with the addition of a feedforward loop.
. Hence, the stability characteristics of a process does not change with the addition of a feedforward loop.