The closed loop response is
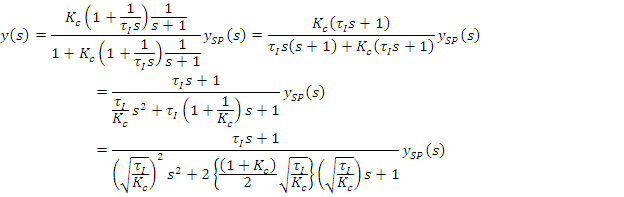 |
(IV.54) |
Let us assume that the response would be underdamped ![]() . Taking
inverse
Laplace
Transform
of the above equation we obtain the time domain solution for unit step change in setpoint
. Taking
inverse
Laplace
Transform
of the above equation we obtain the time domain solution for unit step change in setpoint ![]()
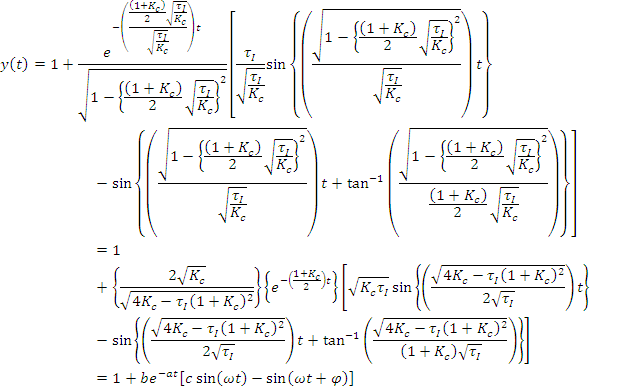 |
(IV.55) |