Solution: Now this problem will be solved using the TMM for illustration of the method to geared system. The pinion and gear have appreciable polar mass moment of inertia. Let us denote the station number of the disc on branch A as 0, the gear as 1 and the station number of the disc on branch B as 2, the gear as 3 (Fig. 6.41).
The state transformation equation for the branch A can be written as
| (a) |
with
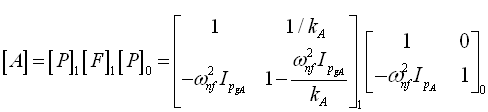 |
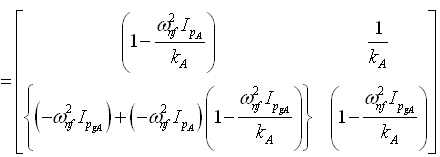 |
(b) |
where kA is the stiffness of shaft A. Similarly, the state transformation equation for the branch B can be written as
| (c) |
with
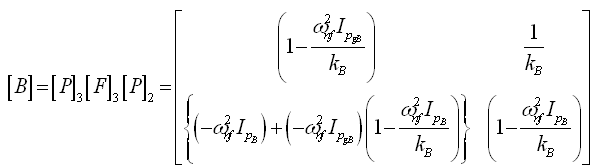 |
(d) |