13.2.5 Various expressions of unbalance
In this section various terminologies used in industry related to unbalance is described. When a static unbalance exists, a centrifugal force ![]() exists.This unbalance force is eliminated if mass
exists.This unbalance force is eliminated if mass ![]() , which satisfied the relationship
, which satisfied the relationship ![]() , is added at radius a in the same plane as the center of gravity G . From this condition it is clear that the product
, is added at radius a in the same plane as the center of gravity G . From this condition it is clear that the product ![]() is more important than the eccentricity itself. Therefore, the quantity
is more important than the eccentricity itself. Therefore, the quantity
|
(13.9) |
is called an unbalance vector and its magnitude ![]() is called a magnitude of unbalance . These quantities are sometimes called simply unbalance . Different types of expressions are described in the general case where an eccentricity e and an inclination φ of the principal axis of moment of area coexist.
is called a magnitude of unbalance . These quantities are sometimes called simply unbalance . Different types of expressions are described in the general case where an eccentricity e and an inclination φ of the principal axis of moment of area coexist.
(a) Resultant Unbalance” ![]() and “Resultant Unbalance moment
and “Resultant Unbalance moment ![]() :
:
|
(13.10) |

|
(13.11) |
The quantity
|
(13.12) |
is called a “resultant unbalance moment” concerning point o, where ![]() is a unit vector in the direction of the bearing centerline and × is the cross product of vectors. Multiplying this by
is a unit vector in the direction of the bearing centerline and × is the cross product of vectors. Multiplying this by ![]() , we get the moment
, we get the moment ![]() produced by the centrifugal forces of all elements.
produced by the centrifugal forces of all elements.
|
(13.13) |
This moment is called a “resultant moment” of the unbalance force. We can represent the unbalance of a rigid rotor by using the “resultant unbalance ![]() ” and the “resultant unbalance moment
” and the “resultant unbalance moment ![]() ”.
”.

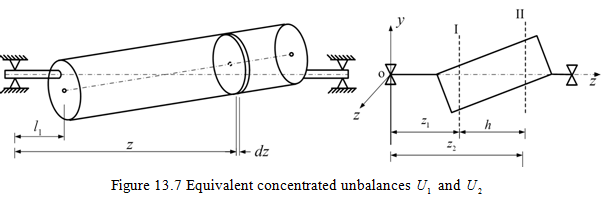
![]()