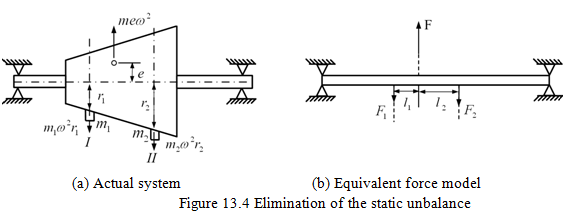
13.2.2 Static Balancing (Two plane balancing)
We represent eccentricities and centrifugal forces as vectors, for which both magnitude and direction are necessary.
![]()

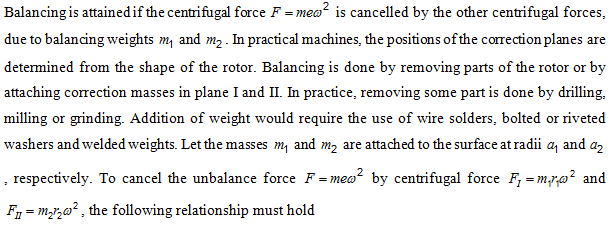
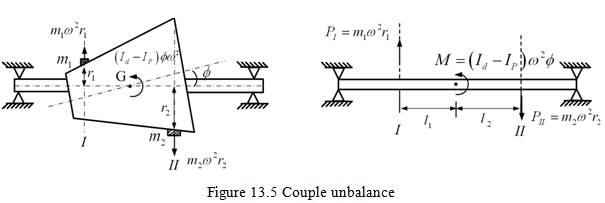
13.2.3 Couple unbalance
13.2.4 Dynamic unbalance
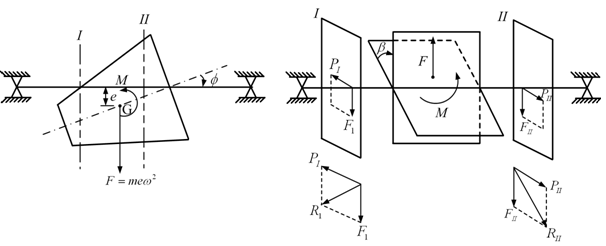
Figure 13.6 Static and couple unbalance
The balancing method described above is called the two-plane balancing . On the contrary as we have seen above, when a rotor is thin, the balancing is attained practically by adding a correction weight in one plane. This method is called the single-plane balancing . Practical balancing machines are made based on such principles. Basic principles of flexible rotor balancing will be described subsequently.