2.3 Proportional-Integral (PI) controller
In some systems, if the gain is too large the system may become unstable. In these circumstances the basic controller can be modified by adding the time integral of the error to control the operation (Fig 6.5.7). Thus the output can be given by an equation,
|
(6.5.2) |
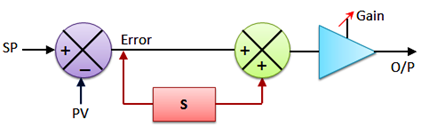
Fig. 6.5.7 Block diagram of P-I controller
The T i is a constant called integral time. As long as there is an error the output of the controller steps up or down as per the rate determined by Ti. If there is no error then the output of the controller remains constant. The integral term in the above equation removes any offset error.
Figure 6.5.8 shows the configuration of pneumatic proportional plus integral controller. Integral action requires the addition of a second bellows (a “reset” bellows, positioned opposite the output feedback bellows) and another restrictor valve to the mechanism.
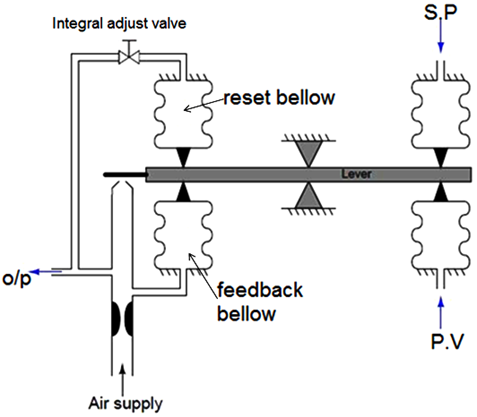
Fig. 6.5.8 Proportional-Integral (P-I) controller
As the reset bellows fills with pressurized air, it begins to push down the left-hand end of the force beam. This forces the baffle closer to the nozzle, causing the output pressure to rise. The regular output bellows has no restrictor valve to impede its filling, and so it immediately applies more upward force on the beam with the rising output pressure. With this greater output pressure, the reset bellows has an even greater “final” pressure to achieve, and so its rate of filling continues.