2. Types of pneumatic controllers
Following is the list of variants of pneumatic controllers.
- Proportional only (P) controller
- Proportional-Derivative (PD) controller
- Proportional-Integral (PI) controller
- Proportional-Integral-Derivative (PID) controller
2.1 Proportional only (P) controller
The simplest form of pneumatic controller is proportional only controller. Figure 6.5.4 shows the pneumatic circuit of ‘proportional only' controller. The output signal is the product of error signal multiplied by a gain (K).
Output = (Error * gain) |
(6.5.1) |
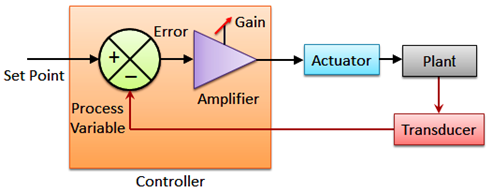
Fig. 6.5.4 Proportional only controller
Consider the pneumatic system consisting of several pneumatic components, viz. flapper nozzle amplifier, air relay, bellows and springs, feedback arrangement. The overall arrangement is known as a pneumatic proportional controller as shown in Figure 6.5.5.
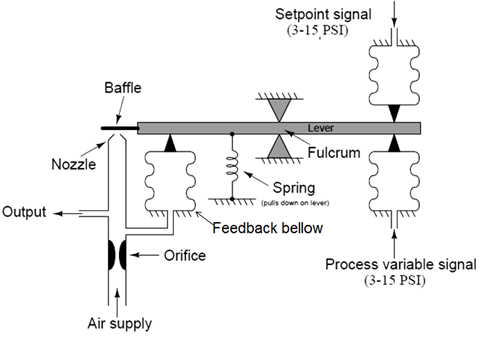
Fig 6.5.5 Proportional only (P) controller elements
It acts as a controller in a pneumatic system generating output pressure proportional to the displacement at one end of the beam. The action of this particular controller is direct, since an increase in process variable signal (pressure) results in an increase in output signal (pressure). Increasing process variable (PV) pressure attempts to push the right-hand end of the beam up, causing the baffle to approach the nozzle. This blockage of the nozzle causes the nozzle's pneumatic backpressure to increase, thus increasing the amount of force applied by the output feedback bellows on the left-hand end of the beam and returning the flapper (very nearly) to its original position. If we wish to reverse the controller's action, we need to swap the pneumatic signal connections between the input bellows, so that the PV pressure will be applied to the upper bellows and the SP pressure to the lower bellows. The ratio of input pressure(s) to output pressure is termed as a gain (proportional band) adjustment in this mechanism. Changing bellows area (either both the PV and SP bellows equally, and the output bellows by itself) influences this ratio. Gain also affects by the change in output bellows position. Moving the fulcrum left or right can be used to control the gain, and in fact is usually the most convenient to engineer.
2.2 Proportional-Derivative (PD) controller
A proportional-derivative (PD) controller is shown in Figure 6.5.6. To add derivative control action to a P-only controller, all we need to place a restrictor valve between the nozzle tube and the output feedback bellows, causing the bellows to delay filling or emptying its air pressure over time.
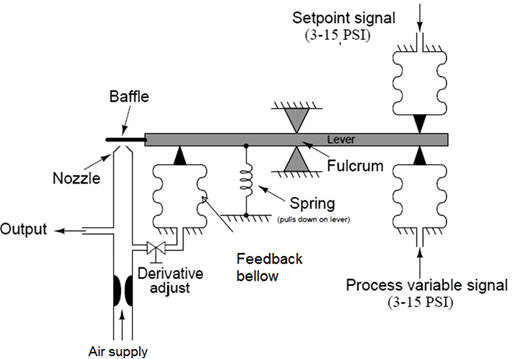
Fig 6.5.6 Proportional-Derivative (PD) controller
If any sudden change occurs in PV or SP, the output pressure will saturate before the output bellows has the opportunity to equalize in pressure with the output signal tube. Thus, the output pressure “spikes” with any sudden “step change” in input: exactly what we would expect with derivative control action. If either the PV or the SP ramps over time, the output signal will ramp in direct proportion (proportional action). But there will be an added offset of pressure at the output signal in order to keep air flowing either in or out of the output bellows at a constant rate to generate the necessary force to balance the changing input signal. Thus, derivative action causes the output pressure to shift either up or down (depending on the direction of input change) more than it would with just proportional action alone in response to a ramping input.