where ΔL is the change in length of the spring with stiffness K1 due to the motion X of the mass. The coefficient of the cubic nonlinear term is assumed to be ![]() . The negative sign is due to the soft spring assumption. For
. The negative sign is due to the soft spring assumption. For ![]() , from Fig. 2.5.3 one may write
, from Fig. 2.5.3 one may write
![]() ........................................................................(2.5.44)
........................................................................(2.5.44)
 ......... (2.5.45)
......... (2.5.45)
Hence the expression for potential energy is
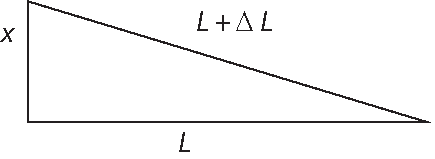
Figure 2.5.3
 .............(2.5.46)
.............(2.5.46)
Taking the generalized coordinate ![]() , the Lagrangian of the system can be written as
, the Lagrangian of the system can be written as 
(2.5.47)
As no external force is acting on the system, the Lagrange Equation can be given by ![]() .......................................................................................................(2.5.48)
.......................................................................................................(2.5.48)
Neglecting the two higher order terms marked in blue in Eq. (2.5.47) and applying (2.5.48) one can get the following equation.
 ............ (2.5.49)
............ (2.5.49)
Or,  ................................................. (2.5.50)
................................................. (2.5.50)
Or, ![]() .........................................................(2.5.51)
.........................................................(2.5.51)
Or,  ........................................................(2.5.52)
........................................................(2.5.52)
Or, ![]() ..............................................................(2.5.53)
..............................................................(2.5.53)