![]() .....................................................................................(2.5.21)
.....................................................................................(2.5.21)
![]() .................................................................................(2.5.22)
.................................................................................(2.5.22)
Using Lagrange equation (2.5.17)
 ................................................................................(2.5.23)
................................................................................(2.5.23)
 ..........(2.5.24)
..........(2.5.24)
![]() ......................................................................................(2.5.25)
......................................................................................(2.5.25)
![]() ...............................................(2.5.26)
...............................................(2.5.26)
Example 2.5.2
Use Lagrange Principle to derive equation of motion of the following system.
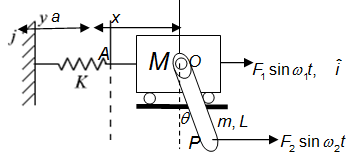
Figure 2.5.1: Vibration of a spring-mass system with a pivoted link
Solution:
Let A is the position of the mass M at time t =0 when the link is in vertical position. Now it has come to position marked O after some time t . The motion can be completely described in terms of a physical coordinate system fixed at the fixed end. Also, one may use translation x of mass M and rotation θ of the link as the generalized coordinates. Here, ![]() .
. ![]() and
and ![]() are the unit vector along the horizontal and vertical direction as shown in the figure. To find the kinetic energy of the link, first we have to determine the velocity of the mass center of the link. The position vector of the mass center of the link is
are the unit vector along the horizontal and vertical direction as shown in the figure. To find the kinetic energy of the link, first we have to determine the velocity of the mass center of the link. The position vector of the mass center of the link is
![]() .............................................................................(2.5.27)
.............................................................................(2.5.27)
So the velocity