The Implementation of Flux Weakening
An implementation of the flux weakening control strategy is shown in Figure 1 . From Figure 1 it can be seen that there are two distinct blocks namely:
- Constant torque mode controller
- Flux weakening controller
The working of the control strategy is as follows:
- Based on the error between the reference speed (ω*m) and the measured speed (ωrn), the required torque Tereq is calculated in the Speed Controller.
- As long as the measured speed of the motor is less than the base speed (ωbase), the Constant Torque Mode Controller operates. Once the measured speed exceeds the base speed, the Flux Weakening Controller comes into action.
- The output of the two controllers explained in step ii is the required magnitude of the stator current (I*mn) and the load angle (δ*).
- Having known the values of I*mn and δ*, the q and d axis currents
 are calculated using equation 2 in Lecture 25. From the calculated values of
are calculated using equation 2 in Lecture 25. From the calculated values of  the values of three phase currents
the values of three phase currents  are calculated using equation 12 or 13. These thee phase currents are in turn multiplied by base value of the current (Ib) and the required values of the currents
are calculated using equation 12 or 13. These thee phase currents are in turn multiplied by base value of the current (Ib) and the required values of the currents  are obtained. All these calculations are done in the Transformation Block.
are obtained. All these calculations are done in the Transformation Block. - The error between
 and the measured three phase currents
and the measured three phase currents  is then fed to the DC-AC Controller and the switching logics for the gates are calculated using PWM technique (refer Lecture 16).
is then fed to the DC-AC Controller and the switching logics for the gates are calculated using PWM technique (refer Lecture 16). - These switching logic are fed to the DC-AC converter and this produced the required voltage to motor.
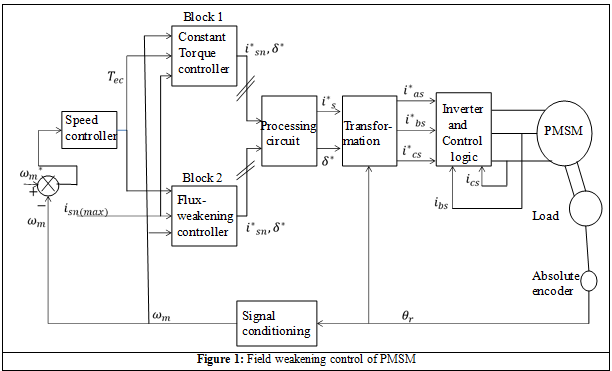
The detailed explanation of the Constant Torque Mode Controller and Flux Weakening Controller are given in the subsequent sections.
The Constant Torque Mode Controller
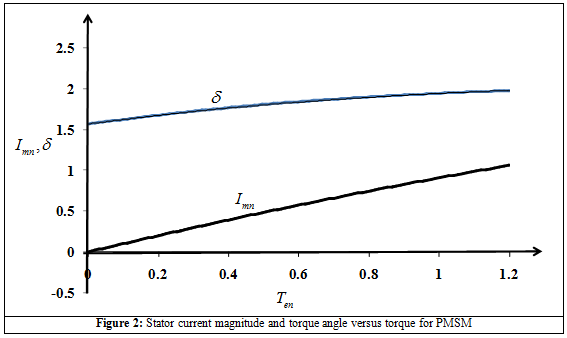
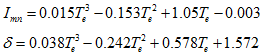
In this block the Optimum torque per ampere control (refer Lecture 25) is implemented. Here, based on Tereq the values of I*mn and δ* are calculated. This is done by using curve fitting the characteristics for online computation or programming it in the memory of the microcontroller. To understand this consider the PM machine whose parameters are given in Table I. For this machine the Torque (Te) versus Imn and δ characteristics are calculated using equation 3a and equation 32 given in Lecture 26 and in Figure 2.The characteristics curves are approximated by third order polynomial and are written as
|
(17) |
The equations 17and 18 are implemented in form of look-up table in the microcontrollers and their implementation is shown Figure 3.