Rewriting the voltage phasor as a polynomial of ![]() and neglecting the stator resistance gives
and neglecting the stator resistance gives
 |
(10) |
Solving equation 10 for ![]() gives
gives
 |
(11) |
In case the rotor speed is given, using equation 11, the d - axis current (idsn) can be obtained which would satisfy the constraints of maximum stator current (Imn) and stator voltage (Vsn) Once the value of ![]() is known then for the given maximum Imn the value of
is known then for the given maximum Imn the value of ![]() can be determined using equation 8. Once the values of
can be determined using equation 8. Once the values of ![]() and
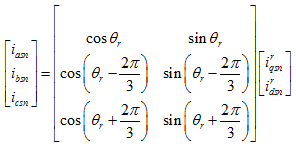
and ![]() are known, the three phase currents iasn,ibsn,icsn can be determined using the inverse transformation as
are known, the three phase currents iasn,ibsn,icsn can be determined using the inverse transformation as
|
(12) |
Using the relations ![]() (refer equation 2 in Lecture 25) in equation 12 results in
(refer equation 2 in Lecture 25) in equation 12 results in
|
(13) |
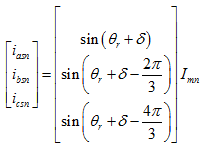
and the torque angle is given by
|
(14) |
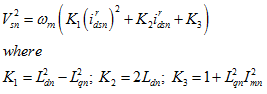
The torque produced by the machine is given by (refer equation 3a in Lecture 25)
|
(15a) |
The torque in p.u. is given by
|
(15b) |
Having established all the relevant, the basic philosophy of field weakening current can be explained as:
- For a given limit on the maximum stator current Imn and the maximum stator voltage Vsn,
 can be calculated using equation 11.
can be calculated using equation 11. - The value of
 is determined using the equation 8 and the value of obtained in step i.
is determined using the equation 8 and the value of obtained in step i. - Once the values of and
 are known, the torque that could be produced by the PM (Temax) machine can be calculated using equation 15.
are known, the torque that could be produced by the PM (Temax) machine can be calculated using equation 15. - In case the requested torque (Tereq) is greater than Temax, then the final requested torque (
 ) is made equal to Temax else it is equal to Tereq. Mathematically this can be written as
) is made equal to Temax else it is equal to Tereq. Mathematically this can be written as 
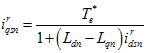
- After having determined the value of final requested torque, the q - axis current () is calculated using equation 15 as:
|
(16) |