Field Oriented Control of Induction Motor
Introduction
The topics covered in this chapter are as follows:
- Field Oriented Control (FOC)
- Direct Rotor Oriented FOC
- Indirect Rotor Oriented FOC
Field Oriented Control (FOC)
In an Electric Vehicle, it is required that the traction motor is able to deliver the required torque almost instantaneously. In an induction motor (IM) drive, such performance can be achieved using a class of algorithms known as Field Oriented Control (FOC) . There are varieties of FOC such as:
- Stator flux oriented
- Rotor flux oriented
- Air gap flux oriented
Each of the above mentioned control method can be implemented using direct or indirect methods.
The basic premise of FOC may be understood by considering the current loop in a uniform magnetic field as shown in Figure 1a. From Lorenz force equation, it can be seen that the torque acting on the current loop is given by
 |
(1) |
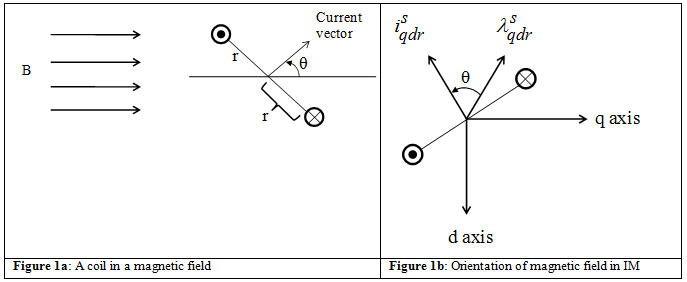
From equation 1 it is evident that the torque is maximised when the current vector is perpendicular to the magnetic field. The same conclusion can be applied to an IM. In Figure 1b orientations of magnetic fields and currents in an IM are shown. The rotor current and flux linkage vectors are shown in Figure 1 at some instant of time. Hence, the torque produced by the motor (refer to Lecture 19) is given by
 |
(2) |