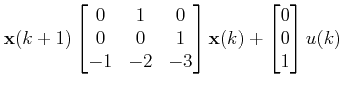
Example 1: Find out the state feedback gain matrix K for the following system using two different methods such that the closed loop poles are located at 0.5 , 0.6 and 0.7.
Solution:
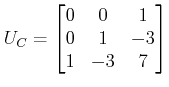
The above matrix has rank 3, so the system is controllable.
Open loop characteristic equation:
or, |
Desired characteristic equation:

Since the open loop system is already in controllable canonical form, T =1.
![]()
where, ![]() and
and ![]() . Thus
. Thus
![]()
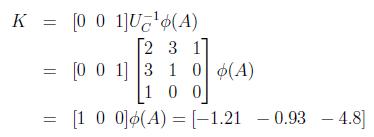
Using Ackermann's formula:
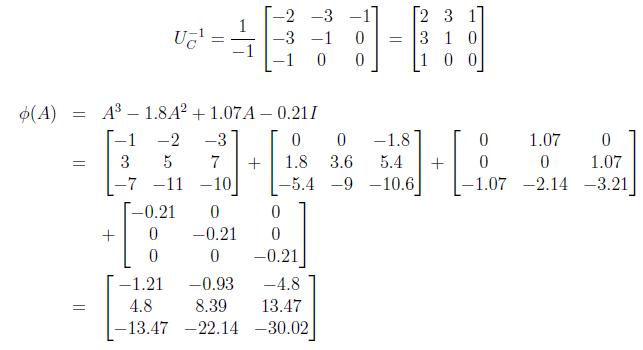
Thus