1.1 Designing K bY thansforming the state model into controllable from
The problem is first solved for the controllable canonical form. Let us denote the controllability matrix by UC and consider a transformation matrix T as
![]()
where 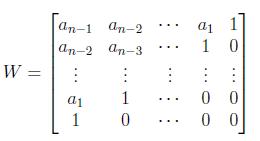
![]() 's are the coefficients of the characteristic polynomial
's are the coefficients of the characteristic polynomial
![]() .
.
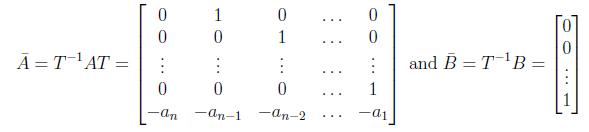
Define a new state vector ![]() . This will transform the system given by (1) into controllable canonical form, as
. This will transform the system given by (1) into controllable canonical form, as
| (3) |
You should verify that
We first find ![]() such that
such that ![]() places poles in desired locations. Since eigenvalues remain unaffected under similarity transformation,
places poles in desired locations. Since eigenvalues remain unaffected under similarity transformation, ![]() will also place the poles of the original system in desired locations.
will also place the poles of the original system in desired locations.
If poles are placed at ![]() , the desired characteristic equation can be expressed as:
, the desired characteristic equation can be expressed as:
 |
(4) |
Since the pair ![]() are in controllable-companion form then, we have
are in controllable-companion form then, we have
Please note that the characteristic equation of both original and canonical form is expressed as: ![]() =
= ![]() =
= ![]() = 0.
= 0.
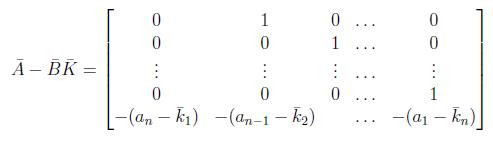
The characteristic equation of the closed loop system with ![]() is given as:
is given as:
| (5) |
Comparing Eqs. (4) and (5), we get
| (6) |
We need to compute the transformation matrix T to find the actual gain matrix
![]() where
where ![]() .
.