1.2 Designing K by Axkermann's Formula
Consider the state-space model of a SISO system given by equation (1). The control input is
| (7) |
Thus the closed loop system will be
| (8) |
Desired characteristic Equation:
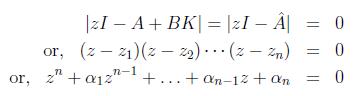
Using Cayley-Hamilton Theorem ![]()
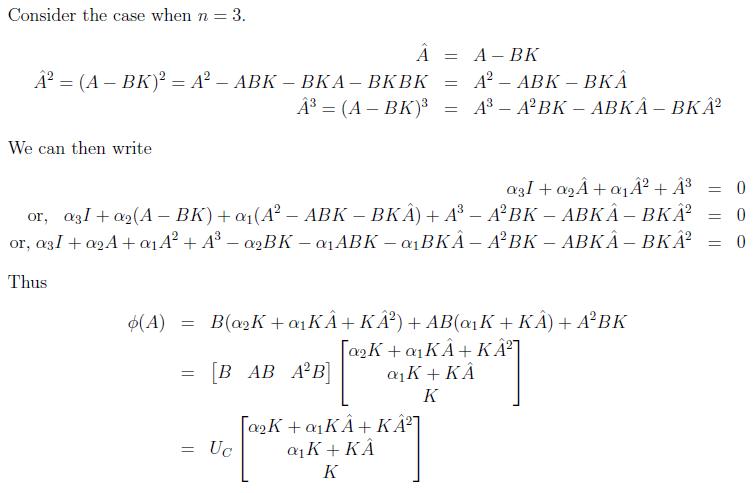
where ![]() is the closed loop characteristic polynomial and UC is the controllability matrix. Since UC is nonsingular
is the closed loop characteristic polynomial and UC is the controllability matrix. Since UC is nonsingular
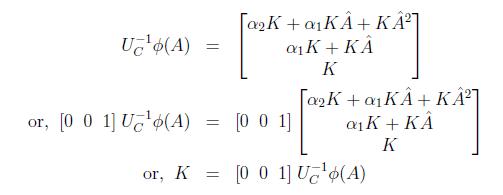
Extending the above for any n,
![]() where
where ![]()
The above equation is popularly known as Ackermann's formula.