The method is very powerful and it has several advantages:
. answers questions of stability of nonlinear systems
. can easily handle time varying systems
. determines asymptotic stability as well as normal stability
. determines the region of asymptotic stability or the domain of attraction of an equilibrium
The main drawback of the method is that there is no systematic way of obtaining Lyapunov functions, this is more of an art than science.
Lyapunov Matrix Equation
It is also possible to find a Lyapunov function for a linear system. For a linear system of the form ![]() we choose as Lyapunov function the quadratic form
we choose as Lyapunov function the quadratic form
| (13) |
where P is a symmetric positive definite matrix. Thus
| (14) |
Simplifying the above equation and omitting k
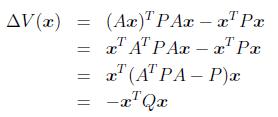 |
(15) |
where
| (16) |
If the matrix Q is positive definite, then the system is asymptotically stable. Therefore, we could pick Q = I , the identity matrix and solve
for P and see if P is positive definite.
The equation (16) is called Lyapunov's matrix equation for discrete time systems and can be solved through MATLAB by using the command dlyap .
Example: Determine the stability of the following system by solving Lyapunov matrix equation.
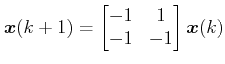 |
Let us take 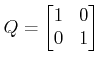 and
and  . Putting these into Lyapunov matrix equation,
. Putting these into Lyapunov matrix equation,
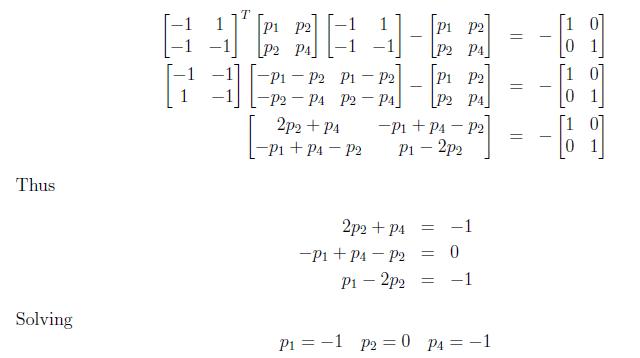
Solving ![]() which shows P is a negative definite matrix. Hence the system is unstable. To verify the result, if you compute the eigenvalues of A you would find out that they are outside the unit circle.
which shows P is a negative definite matrix. Hence the system is unstable. To verify the result, if you compute the eigenvalues of A you would find out that they are outside the unit circle.