2.3 Discrete Time Approximation of A Continuous Time State Space Model
Let us consider the dynamical system described by the state space model (3). By approximating the derivative at t = kT using forward difference, we can write:
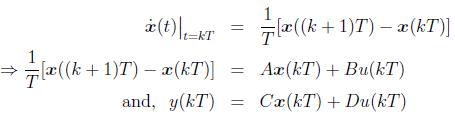
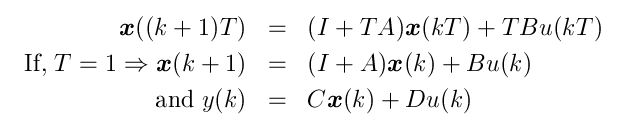
Rearranging the above equations,
We can thus conclude from the discussions so far that the discrete time state variable model of a system can be described by
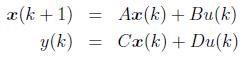
where A, B are either the descriptions of an all digital system or obtained by sampling the continuous time process.